Biomedical Engineering Reference
In-Depth Information
analysis. By compressing a number of complex processes
into a single black box, and representing these processes
by a single input-output equation, a systems model can
provide a concise, highly simplified representation of
a very complex system. You need not understand how
a biological process accomplishes a given task. As long as
you can document some of its behavior quantitatively
(which allows you to construct the input-output equa-
tion), you can usually construct a system representation.
This will allow you to analyze the system's behavior over
a large (perhaps nonphysiological) stimulus range or in-
corporate that process into the analysis of a larger system.
However, this ability to reduce complex processes to
a few elements, each represented by a single equation,
means that these models do not provide much insight
into how the process or processes are implemented by
the underlying physiological mechanisms.
The effector apparatus in
Figure 2.3-9
, the iris mus-
culature, is often termed the
plant
in systems models.
This curious terminology comes from early applications
of linear systems analysis to study the control of large
chemical plants. These large systems were divided into
control processes under the heading
controller,
and ef-
fector processes grouped under the heading
plant.
This
terminology has been transferred to physiological control
models, especially those involving motor control systems.
To complete this system description of the light reflex,
note that changes in pupil area, the output of the system,
will alter the light falling on the retina, the input to the
system. Hence, the output feeds back to the input, cre-
ating a classic
feedback control system
(
Figure 2.3-9
). The
feedback is negative because an increase in light stimu-
lation will generate an increase in the response
d
in this
case a decrease in pupil area
decreasing the light falling
on the retina and offsetting, to some extent, the increase
in light stimulus. In the pupil light reflex, the decrease in
retinal light produced by the decrease in pupil size does
not fully compensate for the increase in stimulus, so the
feedback gain is less than 1 (unity).
Systems models often provide more detail than that
given in the very basic structure of the model in
Figure 2.3-9
.
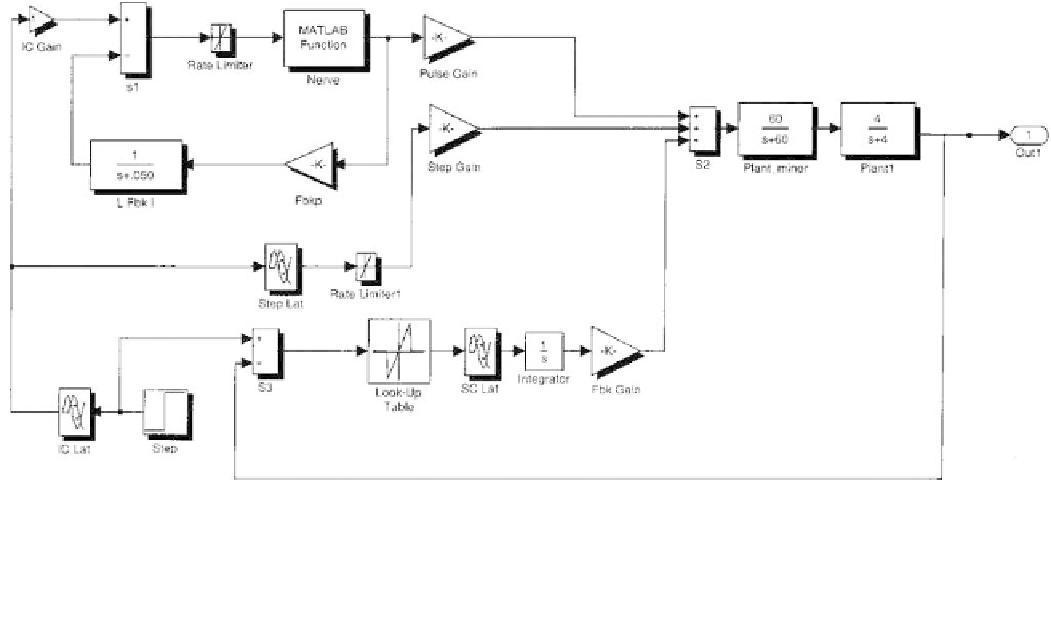
Figure 2.3-10
shows a more detailed model
of the neural pathways that mediate the vergence eye
movement response, the processes used to turn the eyes
inward to track visual targets at different depths. The
model shows three neural paths converging on the ele-
ments representing the oculomotor plant (the two right-
most system elements). Neural processes in the upper
two pathways provide a velocity-dependent signal to move
the eyes quickly to approximately the right position. The
lower pathway represents the processes that use visual
feedback to more slowly fine-tune the position of the eyes
and attain a very accurate final position. The error between
the angle required to precisely image a stimulus in the two
eyes and that actually attained by this neural controller is
generally less than a tenth of a degree.
As with analog models, systems models can be eval-
uated by simulating their behavior on a computer. This
not only provides a reality check
d
do they produce
a response similar to that of the real system
d
but also
permits evaluation of internal components and signals
not available to the experimentalist. For example, what
d
Figure 2.3-10 A model of the vergence eye movement neural control system showing more of the control details. This model can be
simulated using MATLAB's Simulink program.