Biomedical Engineering Reference
In-Depth Information
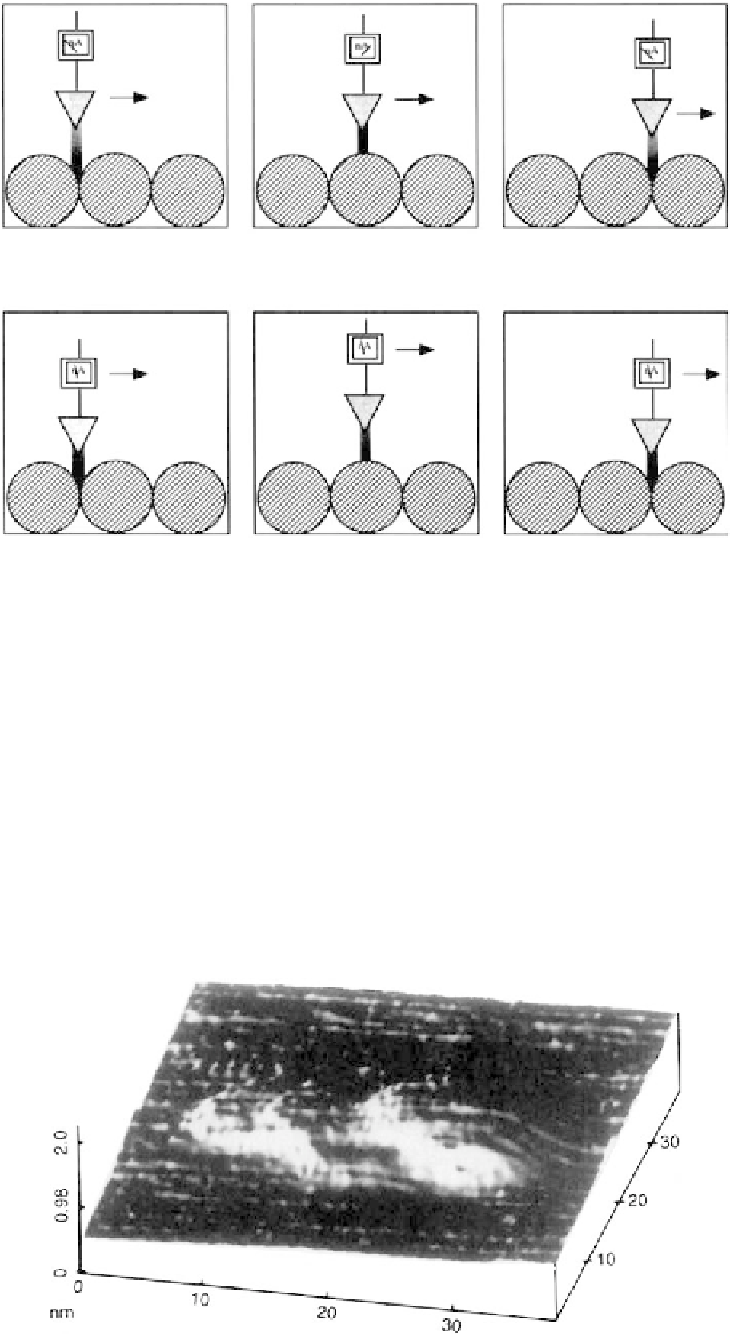
Fig. 3.1.4-14 STM can be performed in two modes. In constant height mode, the tip is scanned a constant distance
from the surface (typically 5-10A
˚
) and the change in tunneling current is recorded. In constant current mode, the tip height is adjusted so
that the tunneling current is always constant, and the tip distance from the surface is recorded as a function of distance traveled in the
plane of the surface.
surface area of the tip can be damaging to soft specimens
(proteins, polymers, etc). However, for more rigid speci-
mens, excellent topographical imaging can be achieved in
contact mode. In tapping mode, the tip is oscillated at
a frequency near the resonant frequency of the cantilever.
The tip barely grazes the surface. The force interaction of
tip and surface can affect the amplitude of oscillation and
the oscillating frequency of the tip. In standard tapping
mode, the amplitude change is translated into topographic
spatial information. Many variants of tapping mode have
been developed allowing imaging under different condi-
tions and using the phase shift between the applied oscil-
lation to the tip and the actual tip oscillation in the force
field of the surface to provide information of the mechan-
ical properties of the surface (in essence, the viscoelasticity
of the surface can be appreciated).
Fig. 3.1.4-15 Scanning tunneling micrograph image of a fibrinogen molecule on a gold surface, under buffer solution (image by
Dr. K. Lewis).