Biomedical Engineering Reference
In-Depth Information
first objective in setting up an FEA problem is to identify
and specify the equations that define the behavior of un-
known variables in the continuum. Such equations typi-
cally result fromapplying the universal laws of conservation
of mass, momentum, and energy, as well as the constitutive
equations that define the stress-strain or other relation-
ships within the material. The resulting differential or in-
tegral equations must then be closed by specifying the
appropriate boundary conditions.
A ''well-behaved'' solution to the continuum problem
is guaranteed if the differential or integral equations and
boundary conditions systems are ''well posed.'' This
means that a solution to the continuum problem should
exist, be unique, and only change by a small amount
when the input data change by a small amount. Under
these circumstances the numerical solution is guaranteed
to converge to the true solution. Proving in advance that
a general continuum problem is ''well posed'' is not
a trivial exercise. Fortunately, consistency and conver-
gence of the numerical solution can usually be monitored
by other means, for example, the already mentioned
''patch test'' (
Zienkiewicz and Taylor, 1994
).
The equations governing the description of a contin-
uum can be formulated via a differential or variational
approach. In the former, differential equations are used
to describe the problem; in the latter, integral equations
are used. In some cases, both formulations can be applied
to a problem. As an illustration we present a case for
which both formulations apply and later show that these
lead to the same FE equations.
V
2
u þ qu ¼ f
in
U
(3.1.3.1a)
subject to the boundary conditions
u ¼ g
on
G
1
(3.1.3.1b)
vu
vn
¼
0on
G
2
(3.1.3.1c)
where
V
2
h
v
2
/
v
x
2
þ v
2
/
v
y
2
is the Laplacian operator in
two dimensions,
n
is the unit outward normal to the
boundary, and
q, f, g
are assumed to be constants for
simplicity, with
q
0. Here, the boundary
G
is made up
of two parts,
G
1
and
G
2
, where different boundary
conditions apply.
When
f ¼
0, Eq.
3.1.3.1a
means that the spatial change
of the gradient of
u
at any point in the
xy
space is
proportional to
u
. The boundary condition 1b sets
u
to
have a fixed value at one part of the boundary. On another
part of the boundary, the rate of change of
u
in the normal
direction is set to zero (boundary condition 3.1.3.1c).
The system represented by Eqs.
3.1.3.1a-c
can be used
to describe the transverse deflection of a membrane,
torsion in a shaft, potential flows, steady-state heat
conduction, or groundwater flow (
Desai, 1979
;
Zien-
kiewicz and Taylor, 1994
).
The variational formulation
A variational equation can arise, for example, from the
physical requirement that the total potential energy
(TPE) of a mechanical system must be a minimum. Thus
the TPE will be a function of a displacement function,
for example, itself a function of spatial variables. A
''function of a function'' is referred to as a functional.
We consider, as an example, the functional
I
(y)of
the function y(
x
,
y
) of the spatial variables
x
and
y
, de-
fined by:
Ið
y
Þ¼
ðð
The differential formulation
Consider the function
u
(
x
, y), defined in some two-
dimensional domain
U
bounded by the curve
G
(
Fig. 3.1.3-4
), which satisfies the differential equation
Γ
1
n
ðV
y
Þ
2
þ q
y
2
2y
f
o
dU
(3.1.3.2)
U
h
Ω
(
Strang and Fix, 1973
;
Zienkiewicz andTaylor, 1994
). The
relevant question is that of all the possible functions y(
x
,
y
) that satisfy Eq.
3.1.3.2
, what particular y(
x
,
y
) mini-
mizes
I
(y)? We get the answer by equating the first varia-
tion of
I
(y), written dI(y), to zero. To performthe variation
of a functional, one uses the standard rules of differenti-
ation. It can be shown that the variation of
I
(y) over y
results in Eq.
3.1.3.1a
, provided Eqs.
3.1.3.1b
and
3.1.3.1c
hold and the variation of
y
is zero on
G
1
.
Thus the
function that minimizes the functional defined in
Eq.
3.1.3.2
is the same function that solves the boundary
value problem given by Eqs.
3.1.3.1a-c
.
Γ
2
A
B
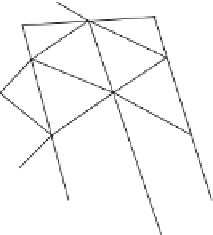
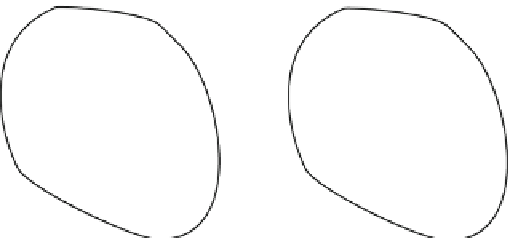
Fig. 3.1.3-4 (A) A continuum U enclosed by the boundary
G ¼ G
1
U G
2
; the function itself is specified on G
1
and its derivative
on G
2
. (B) A finite element representation of the continuum. The
domain has been discretized with general arbitrary triangles of size
h, with the possibility of having curved sides.