Hardware Reference
In-Depth Information
a
b
Mix 1
Mix 2
Mix 3
…
…
…
Mix N
t
t
Dilution/mixing phase
Start of a
dilution/mixing
phase
End of a
dilution/mixing
phase
Droplet transportation phase
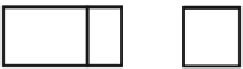
Fig. 4.1
(
a
) Droplet transportation and dilution/mixing operations are scheduled in different
phases; (
b
) start and end time of a D/M phase
degradation of electrodes increases 100 %. Therefore we conclude that the lifetime
of the biochip may be adversely affected by increasing the clock frequency for
dilution/mixing operation, while the completion time of the operation will not be
significantly reduced.
In order to minimize the completion time of a bioassay with less impact on
chip reliability, and also improve the flexibility of the biochip, it is desirable to run
different categories of operations at different clock frequencies. Hence we propose
to schedule transportation/dispensing operations and dilution/mixing operations at
different time segments. The time segment to implement droplet transportation is
defined as the “transportation phase” (T phase), and the segment to implement
dilution/mixing operations is defined as the “dilution/mixing phase” (D/M phase);
see Fig.
4.1
a. Only transportation operations or the dilution/mixing operations are
carried out on the biochip for each phase.
Assume that before the execution of a bioassay we have already determined the
set of dilution/mixing operations to be implemented at each D/M phase. At run-
time, the biochip operates under clock frequency f
T
in the T phase. Output droplets
of previous steps and droplets dispensed from reservoirs are moved to the modules
where the subsequent dilution/mixing operations are to be carried out. After all the
droplets reach their destination modules, the biochip enters the D/M phase. The
dilution/mixing operations that are scheduled in the same phase start together, and
they are carried out under clock frequency f
D/M
. When the feedback from sensors
indicates that all the dilution/mixing operations have been completed, the D/M
phase ends and the biochip enters the next T phase, as shown in Fig.
4.1
b. In this
way, the biochip “switches” between the T phase and the D/M phase with different
clock frequencies based on feedback from sensors.
The following three methods can implement this biochip design using multiple
clock frequencies with negligible extra cost, based on the hardware setup shown in
Fig.
2.5
.