Game Development Reference
In-Depth Information
suffering a large memory cost and high computational complexity (Zhang et al.
2013
).
To obtain better prediction efficiency of the background pixels in the current
frame, MBG can be quantized with a much smaller QP and be encoded as a nondis-
play frame. Moreover, to achieve better prediction efficiency of the background pixels
in the current picture, AVS and AVS2 codec can indicate whether the reconstructed
MBG is the last reference on P/F/B-picture header. BecauseMBGhas few foreground
in terms of pixel numbers and is updated infrequently, it can be quantized with much
smaller quantization parameter (QP) to enlarge the prediction efficiency of the back-
ground pixels of the frames with MBG as reference. AVS2 specification utilizes flag
scene_reference_enable to enable the MBG-based background prediction for each
interprediction picture. Furthermore, an improved predicted motion vector (PMV)
derivation was developed for using MBG as direct or indirect prediction reference.
That is, if one neighbor of the current coding unit (CU) utilizes or does not utilize
the MBG as reference synchronously with the current CU, the contribution of this
neighboring block in deriving the final PMV of the current CU should be set 0. In
addition, when the colocated block in the backward reference frame utilizes theMBG
as reference, the spatial derivation instead of the temporal derivation of PMV should
be adopted for the current coding in B frames. In this way, dividing-zero error can
also be avoided.
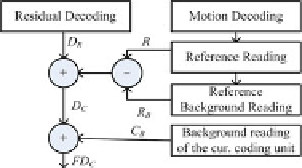
While MBG is set as the second reference frame, the background difference pre-
diction can also be selected to encode each CU. While using background difference
prediction, the finally decoded result of current CU FDC is calculated by
FD
C
=
D
C
+
C
B
=
D
R
+
RR
B
+
C
B
.
(8.8)
In this Equation,
R
R
B
is the difference data between motion-vector-pointed
reference data R and its background
R
B
,
C
B
is the background data in the MBG
at the position of the current CU, and
D
C
−
=
D
R
+
R
−
R
B
is the directly decoded
data using
R
R
B
to compensate the decoded residual
D
R
. Figure
8.11
shows the
decoding process of a CU utilizing background difference prediction. For this encod-
ing process, we firstly search the
C
−
MBG
to get the motion vector
and corresponding
R
. In this process,
C
is the input data of the current CU and Ref is
the first reference frame. Afterwards, transforming, quantizing, and entropy coding
are conducted on the prediction residual
C
−
C
B
within
Ref
−
−
C
B
−
(
R
−
R
B
)
. In such way, CUs with
Fig. 8.11
Decoding process
of a coding unit which
adopts background
difference prediction