Database Reference
In-Depth Information
7.3 Rule Extraction by ADG
Cooperative problem solving by multiagent systems has attracted increasing
attention in recent years. A number of attempts that generate cooperative behavior
by means of genetic programming (GP) have been made in the domain of
multirobot control, RoboCup soccer agents, and so on. To deal with tasks
requiring team solutions, the sharing of roles among agents is needed. Hara et al.
have proposed automatically defined groups (ADG) with the aim of realizing
effective cooperative behavior among heterogeneous agents [5], [6]. This method
can optimize both group structure of agents and action rules of each group.
In this section, we describe a proposed method for rule extraction using ADG
and its application to a diagnostic system for hepatobiliary disorders.
7.3.1 Cooperative Problem Solving by Multiple Agents
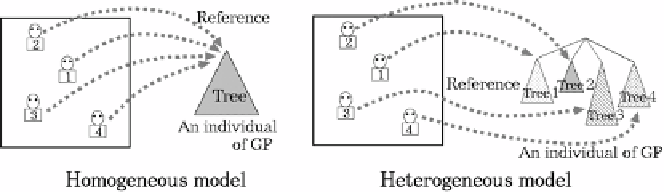
When we generate action control rules of multiagent GP, there are two
conventional models, the homogeneous model and the heterogeneous model.
When all agents in the environment take actions under identical rules, the team is
called a homogeneous team. In GP, each agent refers to the same tree, as shown in
Fig. 7.7. All agents decide their movements according to the same rules derived
from the GP tree. However, because each agent is situated in a different
environment, it is possible that each agent takes different actions according to the
conditions and solves the problem by cooperating with each other.
When different agents in the environment take actions under different rules,
this team is called a heterogeneous team. In GP, an individual maintains multiple
trees, each of which is referred to by the corresponding agent, as illustrated in Fig.
7.7. In the heterogeneous model, the various breeding strategies (restricted
breeding, free breeding, etc.) have been proposed [11], [12]. Free breeding allows
any member of a team to freely breed with any other member of another team. In
restricted breeding, crossover operations are restricted to corresponding branch
pairs. For instance, restricted breeding allows team member 1 to breed only with
another team member 1, and team member 2 to breed only with another team
member 2. Generally, restricted breeding works better than free breeding because
the restriction promotes preservation of diversity and specialization of each agent
by dividing team members into separate breeding pools.
Fig.7.7.
Conventional models for multi-agent control.
Search WWH ::

Custom Search