Environmental Engineering Reference
In-Depth Information
conditions, using Eqs. (
16
) and (
17
), respectively (Gama Goicochea et al.
2014
). In
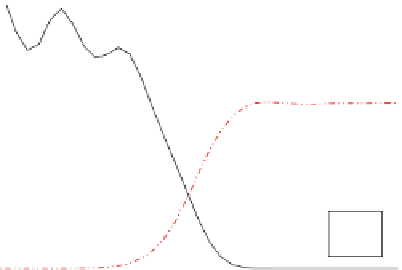
particular, the viscosity (left panel in Fig.
12
) shows what is usually known as “shear
thinning”, i.e., the viscosity is reduced as the shear rate is increased. As we way
see from the figure, the viscosity for brushes of different polymerization degrees
N
,
obeys a universal law for large values of the shear rate. In fact, a scaling law can be
extracted, yielding
ʷ
∼
ʳ
−
0
.
31
independently of the value of
N
. On the other hand,
the friction coefficient (right panel in Fig.
12
) increases with the shear rate but obeys
also a scaling law, which is found to be
69
. These scaling exponents are
in excellent agreement with those predicted using different arguments (Galuschko
et al.
2010
) and they are found to be related according to those predictions (Gama
Goicochea et al.
2014
).
We conclude this section by recalling that there are numerous examples where the
application of the soft DPD potentials have yielded novel and accurate predictions
which make this model one of the leading current tools to understand phenomena
in soft matter systems. Here we have reviewed only some of the recent ones, mostly
taken from our own work and expertise.
0
.
μ
∼
ʳ
4.2 Hard Coarse-Grained Potentials
In this section, we provide examples of simulations of flows with the coarse-grained
Kremer-Grest model for polymers. The two simplest hydrodynamic flows can be
easily set within the MD with DPD thermostat simulations. These two flows are
very important to characterize the behavior in operational conditions of microfluidic
devices. The small size of the channels that confine the fluid implies a laminar regime,
which departs from the turbulent hydrodynamic regime.
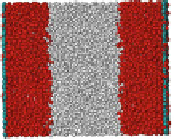
Fig. 13
Density profile of
the brush (
full line
)andthe
melt (
dashed-dotted line
)for
ˁ
˃
−
2
. The inset
shows a configuration of the
simulated system, aligned
with the density profile such
that the brush-melt interface
coincides. Adapted from
Pastorino et al. (
2009
)
=
0
.
77
g
0.8
<
ˁ
m
>
center
0.6
0.4
0.2
ˁ
b
ˁ
m
0
7
8
9
10
11
z(
˃
)

















































Search WWH ::

Custom Search