Graphics Reference
In-Depth Information
where
R xy
is the dynamic-range-compressed image;
( ,
)
Ixy
is the original image,
( ,
)
* denotes the convolution operation; and
Fxy
is the surround function.
In classical retinex algorithm, the surround function is Gaussian function. A
drawback of the algorithm is that it induces halo artifacts along high-contrast edges.
Under the assumption that the illuminant is spatially smooth, halo artifacts are due to
the proximity of two areas of very different intensity.
( ,
)
2.2
L
0
Smoothing Filter
L
0
smoothing filter is an edge-preserving smoothing filter first proposed by Li Xu [4].
In order to sharpen the major edges of image while eliminate the low-amplitude
structures, the filter calculates in an optimization framework using
L
0
gradient
minimization. The optimization framework controls the number of edges through
globally controlling the number of non-zero gradients. The optimization framework
can be expressed as the following formula:
2
(3)
min
(
SI
−+
)
ʻ
CS
(
)}
p
p
S
p
{
}
count
pS
∂+∂≠ (4)
S
0
CS
()
=
xp
yp
in which
p
is a pixel in the image;
I
is the original image; and
S
is the result image
filtered by the
L
0
smoothing filter. The gradient
)
T
∇=∂ +∂ for each pixel
p
is calculated between neighboring pixels along the
x
and
y
directions.
S
(
S
S
p
x
p
y
p
CS
counts
()
is not zero. ʻ is a smoothing parameter,
and a large ʻ makes the result image having few edges.
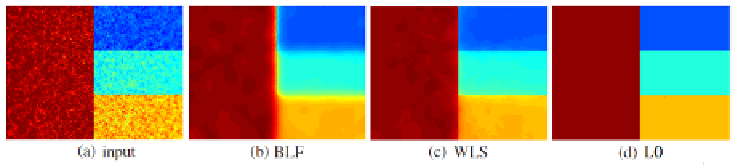
Compared with current edge-preserving smoothing filters depending on local
features like Bilateral filter (BLF) [5] and weighted least square (WLS) [6] filter,
L
0
smoothing filter manages to locate important and prominent edges globally. Fig. 1
shows the corresponding performance comparison. Obviously,
L
0
smoothing filter is
the best edge-preserving smoothing filter of the three filters.
p
whose gradient-magnitude
∂+∂
S
S
x
p
y
p
Fig. 1.
Smoothing performance comparison. From (a) to (d): noisy input, results of BLF, WLS
filter and
L
0
smoothing filter








Search WWH ::

Custom Search