Graphics Reference
In-Depth Information
In order to verify the feasibility of the method, it is validated in the PreScan
1
simu-
lation environment.
The host vehicle following the front vehicle, obtain the bottom (Red line position
in figure 10) of front vehicle's ordinates pixels, calculate the spatial position of ve-
hicle by using the relation formula (5), compare this position information with the
spatial position of the front vehicle detected by the PreScan's ideal radar sensor, the
compared result is shown in figure 11, as can be seen in figure 11, it can meet
the accuracy requirements of vehicles ranging.
Fig. 11.
Distance Measurement by Camera and Radar
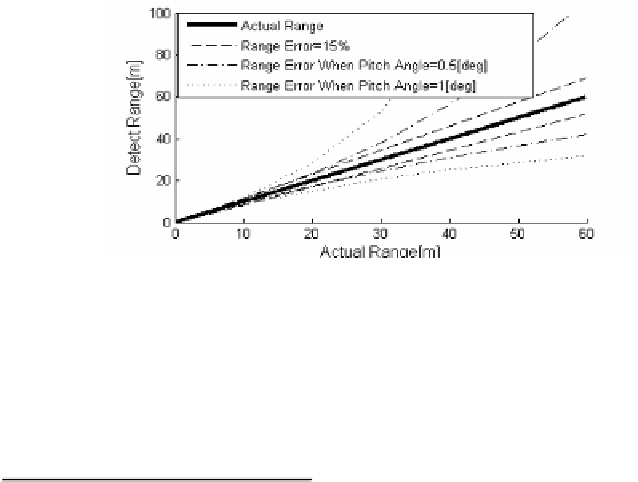
Fig. 12.
Distance Measurement Influence by Pitch Angle
3.2
The Study of Elimination the Impact of Pitch Angle Ranging
When the vehicle runs at the bumpy road or force break which would cause the
change of the pitch angle of the camera sensor, the distance measure accuracy will be
seriously affected. Research shows that when the pitch angle changes ±1°,ranging
1
PreScan is an automotive active safety research software which was developed by TNO
company. It can be used to build a very convenient scenario, and it also has many sensor
models(such as radar, camera and radio) which can be used to detect the vehicle driving in-
formation. Additionally, PreScan has a very convenient interface with Simulink, so it can be
used to do research on the automotive active safety by means of Simulink. PreScan also has a
3D viewer window,which can be used to observe the vehicle's driving condition.

Search WWH ::

Custom Search