Graphics Reference
In-Depth Information
spatial position of the vehicle in front is the automotive active safety system's real
input parameter.
The existing spatial orientation methods by using image information are mostly
based on camera calibration, it is not only cumbersome but also for its effects on
vehicles ranging is not necessarily sufficient satisfactory. Chi-Feng Wu proposed a
method which calculated the mapping relationship between the pixel coordinates and
the spatial distance by training neural network [12], however, this method requires the
neural network training and this process is cumbersome. In order to simply obtain the
spatial position of the vehicle, in this essay is proposed a method that can directly
establish a mapping relationship between the portion of the image pixel coordinates
and spatial distance.
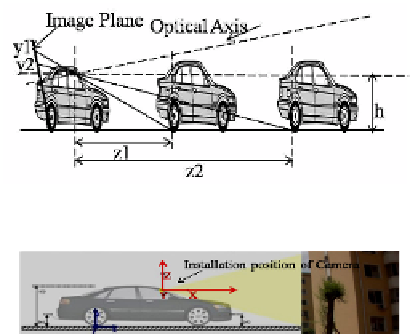
As shown in figure 7, if the front vehicle is at different distance, in the picture, the
vehicle's horizontal position is also at different. When the camera optical axis is abso-
lutely horizontal, the relationship between the position of front vehicles and pixel
coordinates can be obtained from the geometric relationship ,that is,
hf
z
=
(3)
y
where, z is the distance of the front vehicle; h is the height of the camera from the
ground; f is the focal length of the camera; and y is the vehicle's horizontal place in
the picture.
Fig. 7.
Camera Imaging System
Fig. 8.
Schematic View of Coordinate Mapping Experiments
The relationship between the spatial position and the pixel coordinates is theoreti-
cally established according to the above relationship, but the absolute horizontal in-
stallation of cameras cannot be guaranteed in practical applications, while the pitch
angle of camera has great influence on z value[4]. As shown in figure 7, the angle
between the camera optical axis and the plane is
ʱ
; and the relationship between the

Search WWH ::

Custom Search