Graphics Reference
In-Depth Information
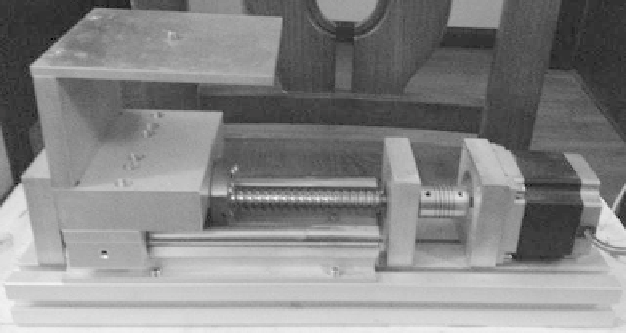
The control unit generates 40 pulses to push the camera for 0.1mm, and a signal is
sent to the shutter and flash to capture an image. This procedure is repeated for many
times until the displacement of the first and last image has covered the field length of
requirement. Consequently, a series of images with same subject but different focus
point is obtained.
Fig. 1.
Macro photo capture device
3
Multi-focus Image Alignment
Currently, most multi-focus fusion algorithms are assumed that source images are
point-wise correspondence, that is, the colors at and around any given pixel in one
image correspond to the colors at and around that same pixel in another image. How-
ever, when using the mechanical device to capture different in-focus images, small
motion between adjacent images is inevitable. In these cases, the input images must
be aligned very well before fusion.
In order to register multiple in-focus images and calculate their motion models, this
paper first extracts MOPS feature from every input image. The MOPS algorithm pro-
posed by Matthew Brown [13] is a relatively lightweight scale invariant feature detec-
tor compared with SIFT algorithm [14], and has the advantage of faster detection
speed. The MOPS algorithm extended Harris algorithm with rotation and scale inva-
riance. When matching the feature points between different in-focus images, it is
necessary to perform nearest neighbor search in the feature space. Using kd-tree based
nearest neighbor search algorithm can reduce search time complexity. The fast feature
matching algorithm based on k-d tree is described as:
(a)
Segmenting foreground and background for each source image;
(b)
Detecting MOPS for each source image's foreground;
(c)
Constructing kd-tree for each image's feature point set;
(d)
Traversing every feature points of each image, initial image index
i
0
=
, and
th
n
n
=
0
I
feature point index
. For the
feature point of image
, find the
Search WWH ::

Custom Search