Graphics Reference
In-Depth Information
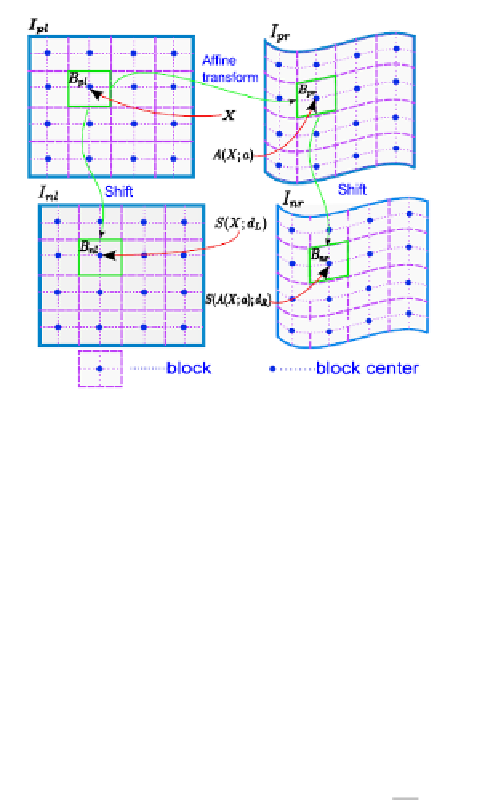
Fig. 1.
Block matching in stereo and temporal images
[
]
[
]
(
(
)
)
( )
(
(
)
)
( )
2
2
E
=
B
A
X
;
ʱ
+
ʔ
ʱ
−
B
X
+
B
S
X
;
d
+
ʔ
d
−
B
X
pr
pl
nl
L
L
pl
(1)
X
X
[
]
(
(
(
)
)
)
(
(
)
)
2
+
B
S
A
X
;
ʱ
+
ʔ
ʱ
;
d
+
ʔ
d
−
B
A
X
;
ʱ
+
ʔ
ʱ
nr
R
R
pr
X
We assume that the current estimates of
a,
d
L
,
d
R
is known, and all their initial
values are set to zero, then iteratively solves for increments to the parameters
ʔ
,
,then update the estimates to
a,
d
L
,
d
R
until the estimates of the parameters
converge. The minimization of the expression in Eq.(1) is performed with respect to
ʱ
d
d
ʔ
ʔ
d
ʔ
d
L
R
and the sum is performed over all of the pixels
X
of
B
pl
. The non-linear expression in Eq.(1) is linearized
by performing a first order
Taylor expansion leading to Eq.(2), Eq.(3), Eq.(4).
ʔ
ʔ
d
d
R
L
2
∂
A
[
]
(
(
)
)
( )
(
(
)
)
()
2
B
A
X
;
ʱ
+
ʔ
ʱ
−
B
X
=
B
A
X
;
ʱ
+
∇
B
⇅
⇅
ʔ
ʱ
−
B
X
pr
pl
pr
pr
pl
∂
ʱ
(2)
X
X
2
[
]
∂
S
(
(
)
)
( )
(
(
)
)
()
2
B
S
X
;
d
+
ʔ
d
−
B
X
=
B
S
X
;
d
+
∇
B
⇅
⇅
ʔ
d
−
B
X
nl
L
L
pl
nl
L
nl
L
pl
∂
d
(3)
X
X
L
[
]
(
(
(
)
)
)
(
(
)
)
2
B
S
A
X
;
ʱ
+
ʔ
ʱ
;
d
+
ʔ
d
−
B
A
X
;
ʱ
+
ʔ
ʱ
nr
R
R
pr
X
2
∂
S
∂
A
(
(
(
)
)
)
(
( )
)
=
B
S
A
X
;
ʱ
+
ʔ
ʱ
;
d
+
∇
B
⇅
⇅
ʔ
d
−
B
A
X
;
ʱ
+
∇
B
⇅
⇅
ʔ
ʱ
nr
R
nr
R
pr
pr
∂
d
∂
ʱ
X
(4)
R


Search WWH ::

Custom Search