Graphics Reference
In-Depth Information
3.2
Optimization of 3-D Point Cloud
There is no ways to avoid existing of noise, even error, during the processes of point
detecting and matching. Three point of containing larger noise or error is called outlier
in this article. And they have bad influence in TIN reconstruction result. To exclude
them, the theory of minimum spanning tree is adopted. Firstly, the minimum spanning
tree is built by Prim algorithm according to the distance between the points. So the
point cloud could be regard as being connected by many bridges, and the length of
bridge is distance between points. As outlier is far away from the target point cloud,
larger is the length of the bridge between them. Seen from this view, outlier is like a
island floating outside of target point cloud. Consequently, selecting an appropriate
length of bridge as a threshold, the point cloud will be divided into many clusters by
breaking bridge whose length is bigger than threshold. Maintaining the point cloud
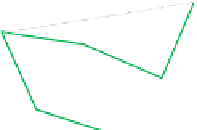
cluster owning most points, other clusters is removed as outliers as shown in figure 5
Fig. 5.
Sketch of removing outlier
The green bold line is the Prim minimum spanning tree and G represents outlier. For
an example, G could be removed when the length of edge EG is selected as a threshold.
3.3
Interpolation of 3-D Point Cloud
When the non-uniform sampling points on manifold are used for dimensionality
reduction, its subset mapped in Low dimensional Euclidean space is non-convex, and
the mapping result is always not right. Consequently,
the topology reconstruction based
on manifold study should be taken in the uniform distributed 3-D point cloud. So the
interpolation and resampling for original point cloud is necessary to get uniform
distribution point cloud. The RBF(Redial Basis Function)based on implicit surface
fitting method is used to achieve the interpolation in this article.
RBF is a real-valued function whose value just relies on the distance from the origin,
as well as a scalar function which is symmetrical along radial.So the interpolation in
3-D space based on RBF could be described as: a points set{
X
i
,
i=1,2,…,N
} in
3
is
given, the function value for every correspondence point is {
f
i
,
i=1,2,…,N
}. A function
F:
3
→
is built ,which is satisfied for every sample point













































Search WWH ::

Custom Search