Graphics Reference
In-Depth Information
detector to obtain all chess-board features in the image. Then we use the gradient
information of the image to help eliminate outliers and organize the true vertices with a
brand new bidirectional growth algorithm. Finally we map the features to 3D locations
in the board to fulfill the camera calibration. As it shows in the experiments, our de-
tector is quite stable and precise, even in extreme conditions like imperfect focus and
ill-illuminations. Our method is completely automatic and performs better than com-
monly used methods.
ID
Object
(a)
(b)
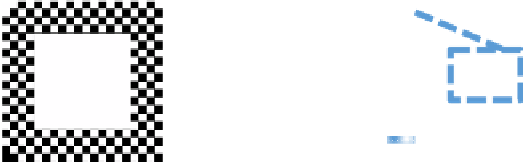
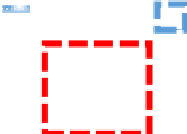
Fig. 1.
Chess-board marker designed in this paper. (a) calibration chess-board (b) different
parts consisted in this calibration board.
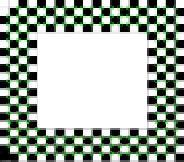
Fig. 2.
Chess-board plane and the image plan have a large angle
2
Related Work
There are various published techniques for finding the chess-board vertices. H. Moravec
[1] designed an algorithm which locates a corner by computing the gradients along eight
directions with the anticipation that large response can be found along edges, but it is
very prone to noises. Harris corner [2] is proposed based on [1] with an additional
non-maximum suppression. F. Mokhtarian and R. Suomela [3] detected corners through
curvature scale space with the help of Canny [4]. They didn't make use of the properties
of the feature and are likely to suffer information loss by wide kernel filtering.
E. Rosten and T. Drummond [5] designed a quick corner detecting method called
FAST which takes samples around a pixel around and determine whether it is a corner.
The Harris and Stephens [2] corner detector is adopted in [6] to locate a grid, before
Hough transform is employed to constraint linearity and discard false responses.














Search WWH ::

Custom Search