Geoscience Reference
In-Depth Information
the parameter a when the ship goes out of
ʵ
-stripe is realized at the moments
distributed with Wald law
Z
y
P
ð
s
\
y
Þ
¼W
c
ð
y
Þ
¼
w
c
ð
z
Þ
dz
0
where
s
¼
m=
Ev
;
v is number of intersections of
ʵ
-stripe,
w
c
ð
z
Þ
¼
p
;
z
3
=
2
exp
c
ð
z
þ
z
1
2
c
=
2
p
2
Þ=
2
c ¼ E
ðÞ
=
D
m
2
2
h.
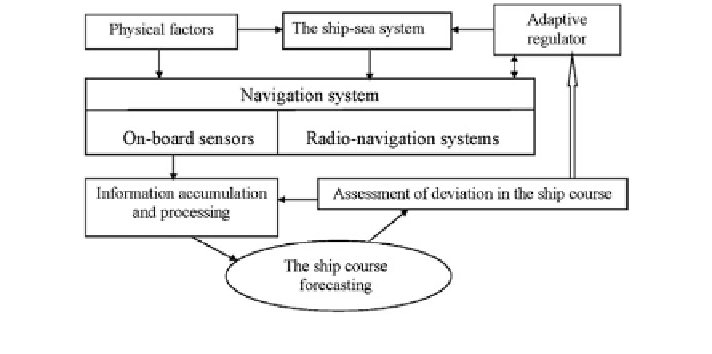
This reasoning gives the possibility to propose adaptive regulator of physical
factors in real time (Fig.
4.36
). There exists an evident restriction on the adaptation
time
In this case, D
g
¼
r
ð
T
t
l
Þ
[
er
=
h, where t
l
T
e=
j j
Adaptive regulator improves navigation parameters realizing the following
operations:
˄
a
:
s
a
max
i
t
i
t
i
1
measurement of navigation parameters to determine the ship position;
processing and analysis of navigation information to determine the ship moving
elements;
calculation of forecasting drifts and measured elements of the ship course;
decision making based on the criterion of the ship drift assessment
control of the ship course elements corresponding to the on-board devices and
observations; and
prognosis of the ship position for the next time interval.
Fig. 4.36 Principal scheme for adaptive management of the ship course parameters
Search WWH ::

Custom Search