Biomedical Engineering Reference
In-Depth Information
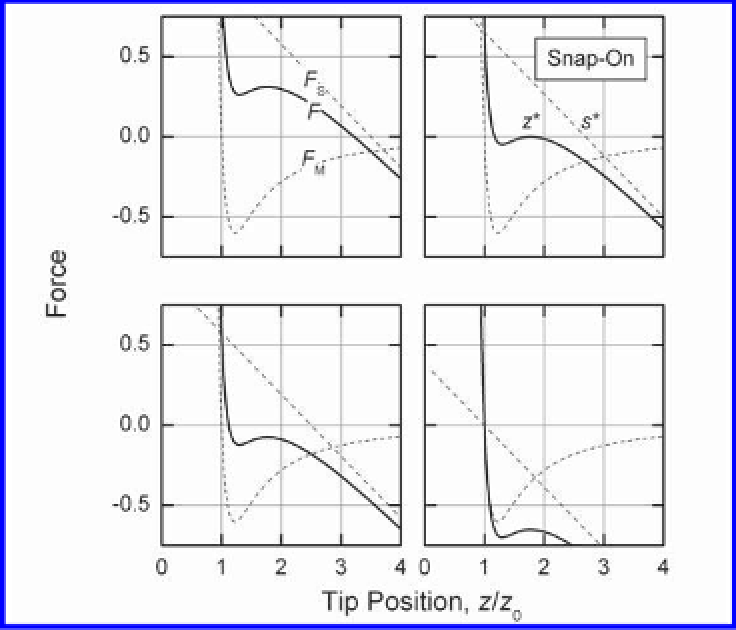
Figure 4-11. The variations in the net force (solid line) with tip position for combined
Mie (M) and harmonic (S) interactions (dotted lines) between a probe tip and a surface as
an actuator moves the probe towards the surface. The probe spring stiffness is sub-critical
such that stable equilibrium positions of the tip are possible only for limited domains of
imposed probe position. The domains are separated by a non-equilibrium “snap-on”
surface) from the instability point. As in the super-critical case, further
decrease in
s
through
s
/
z
0
= 2.5 leads to almost invariant tip position
as
z
∗
/
z
0
→ 1 , until at
s
/
z
0
= 1.0,
z
∗
/
z
0
= 1 and the probe and surface are
at the quiescent point. Further decreases in
s
beyond this point lead to an
indentation interaction as before.
Figure 4-12
displays the retraction segment that leads to a pull-off
instability and separation and begins with the system at the quiescent
point of
s
/
z
0
= 1.0,
z
∗
/
z
0
= 1. As
s
is increased to
s
/
z
0
= 2.5 the tip
Search WWH ::

Custom Search