Database Reference
In-Depth Information
set
{
1
,
2
,...,M}
of possible classes. Each
θ
i
is considered to be the index of the
category to which the
x
i
is the outcome of the
set of measurements made upon that individual. We use to say that ”
i
th individual belongs, and each
x
i
belongs
θ
i
” when we mean precisely that the
i
to
th individual, upon which measurements
x
i
have been observed, belongs to category
θ
i
.
x, θ
x
Anewpair(
) is given, where only the measurement
is observable, and it
is desired to estimate
by using the information contained in the set of correctly
classified points. We shall call
θ
x
n
∈ x
1
,x
2
,...,x
n
the nearest neighbor of
x
if
x
n
,x
min
d
(
x
i
,x
)=
d
(
)
,
i
=1
,
2
,...,n
θ
n
of its nearest
The NN classification decision method gives to
x
the category
x
n
. In case of tie for the nearest neighbor, the decision rule has to be
modified in order to break it. A mistake is made if
neighbor
θ
n
.
An immediate extension to this decision rule is the so called
k
-NN approach
[4], which assigns to the candidate
=
θ
x
the class which is most frequently rep-
resented in the
k
nearest neighbors to
x
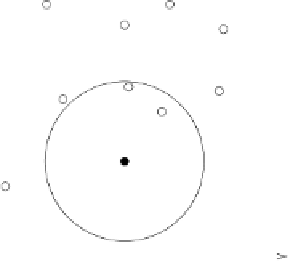
. In Figure 3 , for example, the 3-NN
decision rule would decide
x
as belonging to class
θ
o
because two of the three
nearest neighbors of
θ
o
.
Much research has been devoted to the
K
-NN rule [6]. One of the most im-
portant results is that
K
-NN has asymptotically very good performance. Loosely
speaking, for a very large design set, the expected probability of incorrect clas-
sifications (error)
x
belongs to class
R
achievable with
K
-NN is bounded as follows:
0 Class Case
+
+
+
+
+
Candidate
+ Class case
+
Fig. 3.
3-NN classification method. A voting method has to be implemented to take
the final decision. The classification given in this example by simple voting would be
class=circle.






Search WWH ::

Custom Search