Geology Reference
In-Depth Information
-5
bb
i
in
es
(8.2)
i
Multiyear ice
-10
Realistically, however, the two estimates deviate. The two
sets of equations (8.1) and (8.2) contain (
m
+
n
) equations
in
m
unknowns. An optimal solution for
b
i
es
can be devised
to minimize a cost function Φ, which is composed of
weighted summation of the square of errors from equa-
tions (8.1) and (8.2), Φ
1
and Φ
2
, respectively:
-15
First-year ice
-20
Early
melt
Melt
onset
Freeze-up
Advanced melt
Winter
FF
11 22
(8.3)
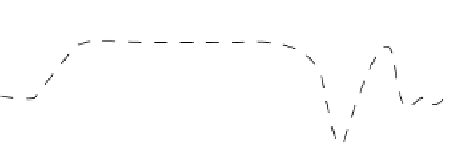
Figure 8.5
Seasonal evolution of backscatter coefficient (
σ
0
)
over a period spanning the annual sea ice cycle based on
the C‐band ERS‐1 and Radarsat SAR for thick FY ice and
MY ice in the Canadian Central Arctic [adapted from
Barber
,
2005].
where
F
1
and
F
2
are weighting factors assigned according
to the relative importance of each term, and
m
Wb b
i
(
in
es
)
2
(8.4)
heterogeneous; i.e., containing more than one ice type.
An attempt to compile a database of radar backscatter
from different ice types using the IAPs from the CIS oper-
ational Radarsat image analysis is presented in
Shokr
[2009] and described below.
Most of the IAPs have two or three ice types that are
assumed to be distributed uniformly within the polygon.
However, some polygons feature a single ice type and
can therefore be used directly to establish a signature
database of backscatter for the given ice types. The
number of these homogeneous polygons is very small
while the majority of the polygons are heterogeneous.
The technique for compiling an ice type signature from
a set of heterogeneous polygons is based on an assump-
tion that the average backscatter from a given polygon is
a linear summation of backscatter components engen-
dered by each ice type. Suppose that there are
m
number
of possible ice types that exist in
n
number of IAPs
(
n
>
m
). If the concentration of ice type
i
in polygon
j
is
subjectively estimated to be
C
ij
by an ice analyst, then
the expected backscatter
B
ex
from that polygon can be
written as
1
i
i
i
1
represents the error between estimated and initial back-
scatter determined from the homogeneous IAPs, and
n
(
BB
j
ex
ob
)
2
(8.5)
2
j
j
1
represents the error between observed and expected back-
scatter, where the latter is determined from equation (8.1)
using ice types and concentrations in the heterogeneous
IAPs. In equation (8.4)
W
i
is a weighting factor that is
proportional to the confidence level of
b
i
in
.
The derivative of Φ
2
with respect to
b
i
es
is obtained
after substituting equation (8.1) into equation (8.5):
n
m
2
Cb CBC
es
ob
(8.6)
2
ij
i
jk
j
jk
b
es
j
1
i
1
i
where
k
=1, …,
m
.
The desired solution that minimizes equation (8.3) can
then be obtained by substituting equations (8.1), (8.4),
and (8.5) into equation (8.3), setting its first derivative
with respect to
b
i
es
to zero and rearranging terms, thus
m
ex
es
B b
j
(8.1)
iji
i
1
for
j
=1, …,
n
, and
b
i
es
is the estimated backscatter from
ice type
i
, which is unknown. Obviously,
C
ij
is zero if ice
type
i
does not exist in polygon
j
. Let
B
j
ob
be the average
observed backscatter from polygon
j
. Ideally, the expected
and observed average backscatter should be equal, but
actually they are not since
b
i
es
can be estimated only
approximately from Equation (8.1) since
n
>
m
.
Suppose also that
b
i
in
is an initial value of backscatter
from ice type
i
, which can be determined as the average
backscatter from areas of homogeneous cover of that
type. Once again, ideally,
m
n
n
FW FCCb FWbFBC
i k
es
in
ob
jk
(8.7)
1
2
ji
jki
1
kk
2
j
i
1
j
1
j
1
Once again,
k
= 1, …,
m
, and
δ
is the Dirac delta function.
Equation (8.7) is a set of
n
linear equations in
m
unknowns of
b
i
es
. Values of
b
in
are obtained from all
homogeneous polygons of ice type
k
(or OW), which are
provided in the IAP set.
F
1
and
F
2
were set to 1 in order to
reflect the equal confidence in data from homogeneous
or nonhomogeneous polygons (since both are subjective