Geology Reference
In-Depth Information
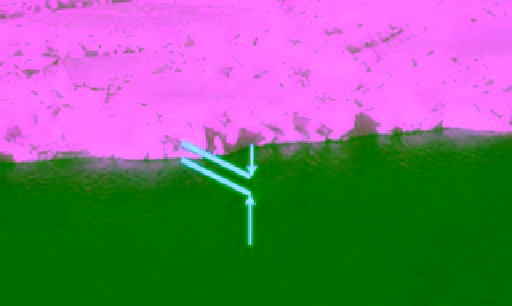
Freeboard
Inner
beam
700 km
Outer
beam
900 km
Figure 7.11
Illustration of freeboard of an ice sheet.
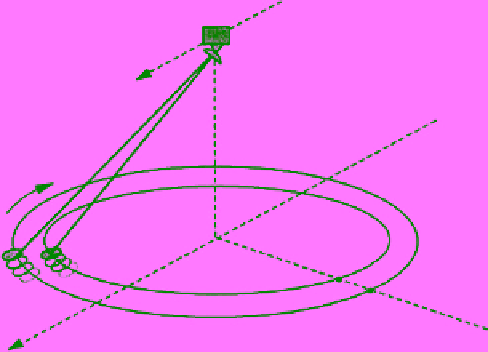
Figure 7.10
Viewing geometry of the SeaWinds scatterometer
with its rotating antennae that acquire data in HH and VV from
the inner and outer bean, respectively. The sensor was onboard
the QuikSCAT satellite.
known. This can be estimated with respect to the water
surface as shown in Figure 7.11. The reference water sur-
face can be defined when the sensor flies over a gap
between the ice floes. The freeboard of sea ice is balanced
by its draught (the ice below the waterline) according to
the buoyancy law. This entails that the ratio of the free-
board to the total thickness of the ice sheet is proportional
to the ratio of the densities of the ice composition (i.e., ice
and snow) and water. The buoyancy law can be used to
determine the average ice thickness from the measured
freeboard (the freeboard is roughly equal to one‐eighth of
the ice thickness). An illustration showing the principles
of observations of the radar and laser altimeters is pre-
sented in Figure 10.34. The equations for determining ice
thickness from both sensors are given in section 10.4.3.
Radar altimeters were part of the payload of ERS‐1,
ERS‐2, and ENVISAT. They all operated in the Ku
microwave band (13.8 GHz). However, as those satellites
were Sun synchronous, the orbit inclination was 98.52°.
This did not allow data collection over an area centered
around the geographic polar points. ESA's Cryosat mis-
sion with its single payload of a radar altimeter has been
designed to cover as much of the polar regions as pos-
sible. It has been considered an “ice explorer” mission.
Consequently, the orbit has a high inclination of 92°
(closer to 90°), taking it just 2° short of the poles. To
achieve this, the orbit has to be non‐Sun synchronous.
Cryosat‐1 was lost in a launch failure in 2005, but the
program was resumed with the successful launch of
Cryosat‐2 on 8 April, 2010. Cryosat‐2 can acquire images
in the polar areas up to 88° latitude. It has three modes
of operation. The SAR mode provides the finest ground
resolution of 250 m with swath width of 250 km.
The first laser altimeter, on the other hand, was launched
onboard the ICESat satellite. This program was undertaken
by NASA. ICESat‐1 was launched in January 2003 and
ended its mission in August 2010. The satellite carried a sole
instrument; the Geoscience Laser Altimeter System
(GLAS), which is a space‐based version of the LIDAR
scatterometer onboard the QuikSCAT satellite on 19 June,
1999. QuikSCAT scanned the surface in circular patterns
(Figure 7.10) and acquired data in two co‐plarization
modes HH and VV at incdence angles 46° and 54°, respec-
tively. This sensor provided valubale sea ice data over the
polar regions for more than 10 years before its rotating
antenna stalled on 23 November, 2009. The scatterometer
that followed QuikSCAT is called Ocean Scatterometer
(OSCAT), built by the Indian Space Research Organization
(ISRO). This is another Ku‐band sensor. OSCAT was
launched aboard the Oceansat‐2 satellite on 23 September,
2009. Data from the SeaWinds and OSCAT have been
reconstructed onto a polar stereographic grid using
knowledge of the scan geometry and antenna pattern.
The product is available as daily averaged maps of back-
scatter at a much finer resolution (a few kilometers) com-
pared to the original data [
Early and Long
, 2001].
Space‐borne altimeter sensors have been developed to
measure the thickness of ice sheets, but their applications
have been extended to measure sea ice and snow thick-
ness. They proved to be a cutting edge technology (relative
to other sensors) for better and extensive estimates of ice
thickness. Two types of altimeters are used: radar and
laser. Each category refers to the type of transmitted
pulses. The instrument measures the time the pulse takes
to return to the sensor and the shape of the return pulse.
The time determines how far the satellite is from the sur-
face. Since radar penetrates dry snow, the signal received
by the radar altimeter is reflected off the ice surface. For
the laser altimeter, since the beam does not penetrate the
snow, the reflecting surface is the top of the snow cover.
Therefore, the snow depth is included in the thickness
measurements from the radar altimeter. In order to deter-
mine the ice thickness, the freeboard of the ice must be