Geology Reference
In-Depth Information
applications such as determining the route for marine navi-
gation through ice‐covered water, active microwave sensors
are more suitable. These sensors produce data at finer reso-
lutions of a few tens of meters or even a few meters in
some modes. Small‐scale ice features such as ridges, small
leads, and coastal polynyas can be identified.
As mentioned before, active microwave (radar) sensors
are self‐illuminating and operate at several modes of view-
ing geometry (more details are given in section 7.6.2.1). The
most commonly used system is SAR. The first space‐borne
SAR was launched onboard the Seasat satellite on 28 June,
1978 carrying an L‐band HH polarization antenna (HH
stands for horizontally transmitted-horizontally received
polarization). The mission ended abruptly on 9 October,
1978 due to a power failure. In spite of its short period of
operation (105 days), Seasat provided data of great scien-
tific value and proved the concept of using SAR for oceanic
and sea ice applications to be successful. It sets the stage for
more space‐borne SAR missions that were developed later.
The 25 m fine resolution SAR imagery data from Seasat
were used to produce the first detailed sea ice motion maps.
Individual ice floes could be identified in sequential images
and that enabled the monitoring of ice field and ice track-
ing [
Hall and Rothrock
, 1981]. An ice deformation grid was
also produced for the first time from Seasat [
Fily and
Rothrock
, 1987]. This allowed the identification of open-
ings in the ice cover and determining heat exchange from
the ocean to the air.
Carsey and Holt
[1987] measured the
impact of the wind on ice drift at the marginal ice zone (see
section 2.6.4) from Seasat data. Based on these successful
initial applications, NASA supported the development of
the Geophysical Processor System (GPS) as a subsystem at
the Alaska SAR Facility (ASF) at the University of Alaska,
Fairbanks. This system has been dedicated to producing
sea ice and ocean products from SAR imagery [
Kwok, et al.,
1990;
Weeks et al.,
1991;
Kwok and Baltzer,
1995]. In 1999 it
was upgraded to process SAR Arctic ice images from other
satellites into ice data products. More information is intro-
duced later in this Section and in section 10.7.
The first space agency that captured on the legacy of
Seasat to develop the next space‐borne SAR system was
the European Space Agency (ESA). They launched their
first SAR sensor onboard the European Remote Sensing
(ERS‐1) satellite in 1991. That was followed by its replica
onboard ERS‐2 in 1995. Both sensors operated in a C‐band
(5.66 cm wavelength) VV polarization (see section 7.6.2 for
definition). The viewing geometry was limited to one mode
featuring a 100 km swath over an incidence angle ranging
from 20° to 26° at a resolution of approximately 30 m.
ERS‐2 had been operating for more than 16 years when its
science mission ended in July 2011. The two satellites
acquired tens of thousands of images of sea ice. They also
operated “in tandem” mode for a few years to allow for the
acquisition of interferometric data pairs. These data have
not found applications in sea ice, though a first attempt to
estimate relative ice movements and surface topography is
presented in
Dammert et al.
[1997].
The original focus of the ERS missions was on moni-
toring the ocean and sea ice. A wide range of sea ice
research and applications were conducted using SAR on
both satellites during the 1990s. During that early stage
of SAR ice applications, the research was centered on a
few themes that included: (1) visual identification of sur-
face features (e.g., ridges, fractures, melt ponds, and ice
floe shapes), (2) classification of ice types [
Fetterer et al.
,
1994;
Similä
, (1996);
Kaleschke and Kern
, 2002), and (3)
evaluation of the images for their use in operational sea
ice monitoring programs [
Shokr
, 1994;
Herald and
Berglund
, 1995;
Shokr et al
., 1996;
Ramsay et al.,
1998].
The ice classification required compilation of backscatter
signature from different ice types and surfaces. This task
received wide attention and was addressed in several stud-
ies. For example,
Kwok and Cunningham
[1994] sampled
backscatter of ice types in the Beaufort Sea using ERS‐1
data and speculated reasons for their variability in terms
of physical processes. Other studies that include estima-
tion of ice backscatter using either direct observations or
microwave scattering models are presented in
Ulander
et al.
[1994],
Askne et al.
[1994],
Morris et al.
[1998],
Johannessen et al
. [2007], and
ESA
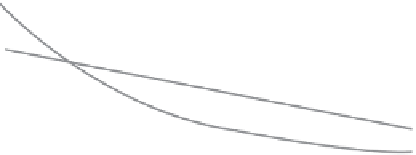
[1998]. The latter
reference included a study on the variation of radar
backscatter from different ice types produced by the
French Research Institute for Exploitation of the Sea
(Institut français de recherche pour l'exploitation de la mer—
IFREMER) (Figure 7.7). The overlap of the backscatter
signatures from different ice types highlights the problem
0
Open water
−5
First-year ice
−10
−15
Multiyear ice
Marginal ice zone
−20
20
30
40
50
Incidence angle (degree)
Figure 7.7
Approximate variation of backscatter obtained from
ERS‐1 SAR with radar incidence angle for open water and three
ice types [ESA, 1998].