Global Positioning System Reference
In-Depth Information
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
[62
Lin
—
6.6
——
Nor
PgE
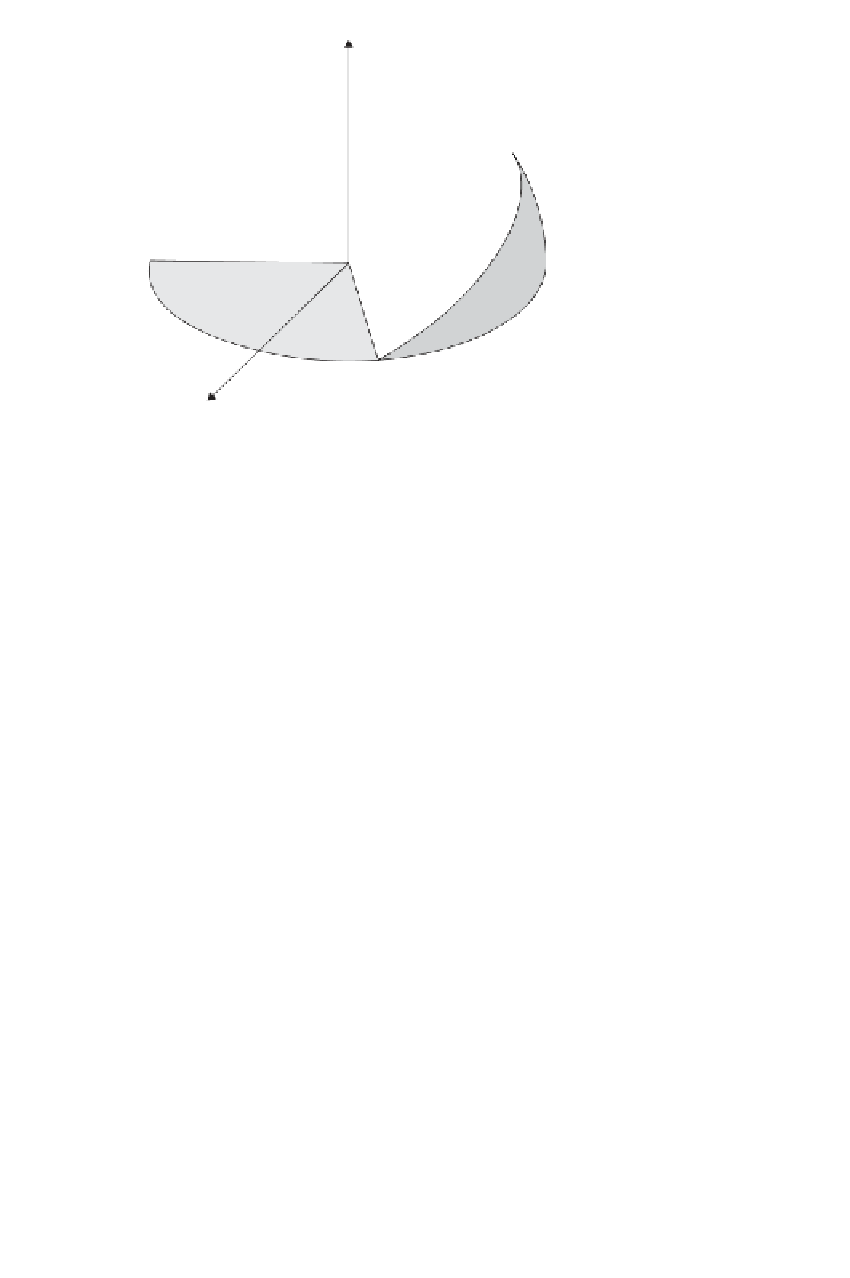
Figure 3.3 Angular momentum vector and Kepler elements.
The angular momentum
vector is orthogonal to the orbital plane.
#
&
h
2
X
+
h
Y
%
(
tan
−
1
i
=
(3.51)
h
Z
[62
By defining the auxiliary coordinate system (p) such that the
p
1
axis is along the nodal
line,
p
3
is along the angular momentum vector, and
p
2
completes a right-handed
coordinate system, we obtain
p
=
R
1
(i)
R
3
(
Ω
)
X
(3.52)
The sum of the argument of perigee and the true anomaly becomes
tan
−
1
p
2
p
1
ω +
f
=
(3.53)
Thus far, the orbital plane and the orientation of the orbital ellipse have been deter-
mined. The shape and size of the ellipse depend on the velocity of the satellite. The
velocity, geocentric distance, and the magnitude of the angular momentum are
=
X
v
(3.54)
r
=
X
(3.55)
h
=
h
(3.56)