Global Positioning System Reference
In-Depth Information
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
satellite positions and satellite clock corrections. If we use the ionospheric-free pseu-
dorange function, the postprocessed precise ephemeris, and precise satellite clock
corrections, we call it precise point positioning. The latter term also applies when us-
ing the IGS rapid ephemeris that is currently available with a delay of several hours,
or the predicted (ultrarapid) IGS ephemeris instead of the postprocessed ephemeris.
Fortunately, the satellite clocks can now be more accurately predicted since selective
availability has been turned off. If the satellite ephemeris and clocks are estimated
from observations and are available in near real time, say with a latency of merely
seconds, one speaks of real-time precise point positioning (real-time PPP). The latter
approach requires (a) real-time orbit determination processing capability, a global
network of tracking stations that forward dual-frequency observations to a process-
ing center in real time and (b) communicating the results of the orbit determination,
usually in the form of corrections, to the user in the field in real time.
Muellerschoen et al. (2000) describe the results of an Internet-based dual-frequency
real-time precise point positioning system developed at JPL. The website IGDG
(2002) contains several publications on the subject and offers a live demonstration of
position determination at the JPL facility using Internet-based global differential GPS
(IGDG), as the technique is called at JPL. Aspects of real-time orbital determination
are addressed in Muellerschoen et al. (2001). JPL uses, at least originally when
developing the technique, about fifty sites of NASA's global GPS network that is
operated in batch mode over the Internet. Data forwarded by the stations include
C/A-code and P1 and P2 code pseudoranges, the carrier phase observations, signal-
to-noise ratios, and the receiver's point positioning solution. JPL's modified GIPSY
program, called real-time GIPSY (RTG), is used to estimate orbits, polar motion,
UT1-UTC, and tropospheric corrections at the known network reference stations once
per minute. The satellite clock corrections are computed once per second. Figure 7.14
[25
Lin
—
3.2
——
No
PgE
[25
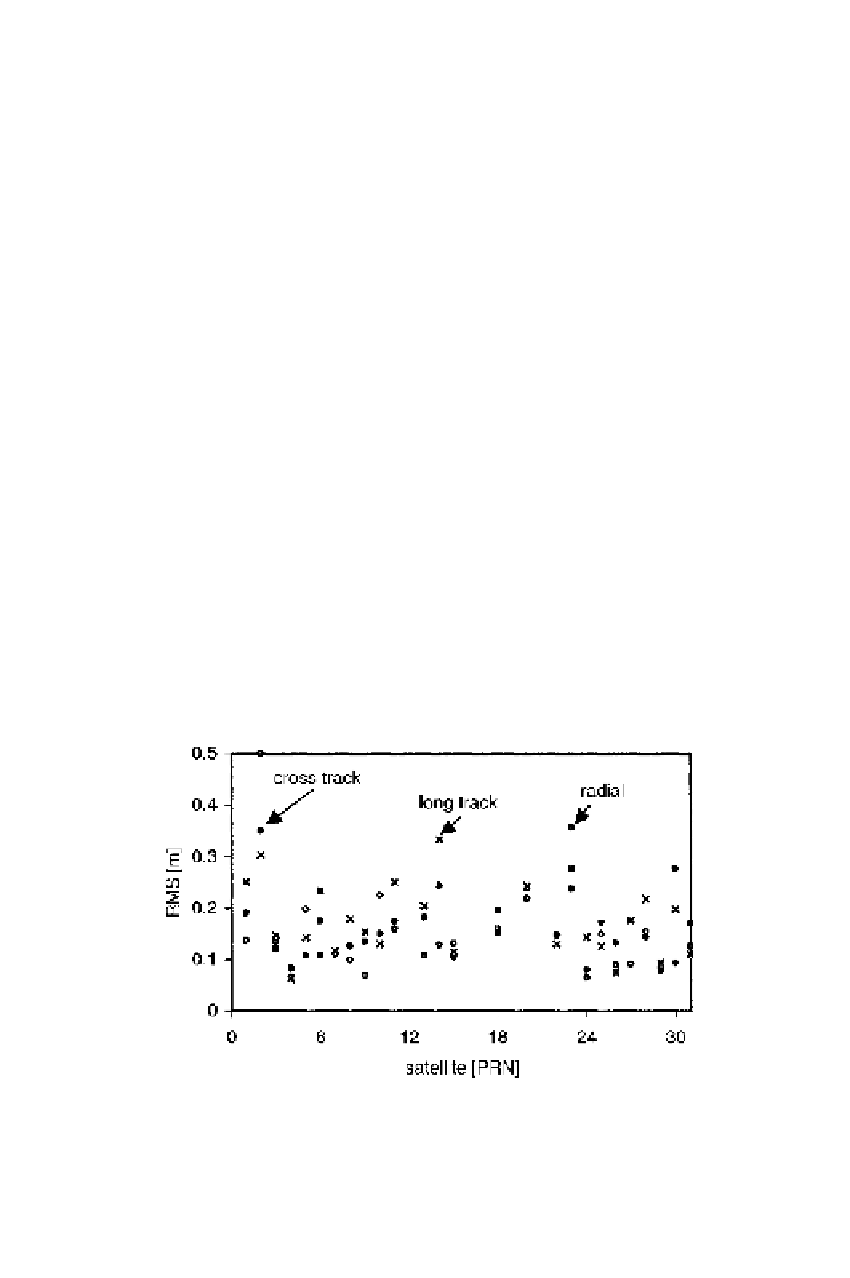
Figure 7.14 Radial, cross-track, and along-track RMS of difference between real-time
orbits and IGS rapid solution for October 9, 2002.
The computation interval is 15 minutes.
(D
ata from Bar-Sever, JPL.)