Global Positioning System Reference
In-Depth Information
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
[21
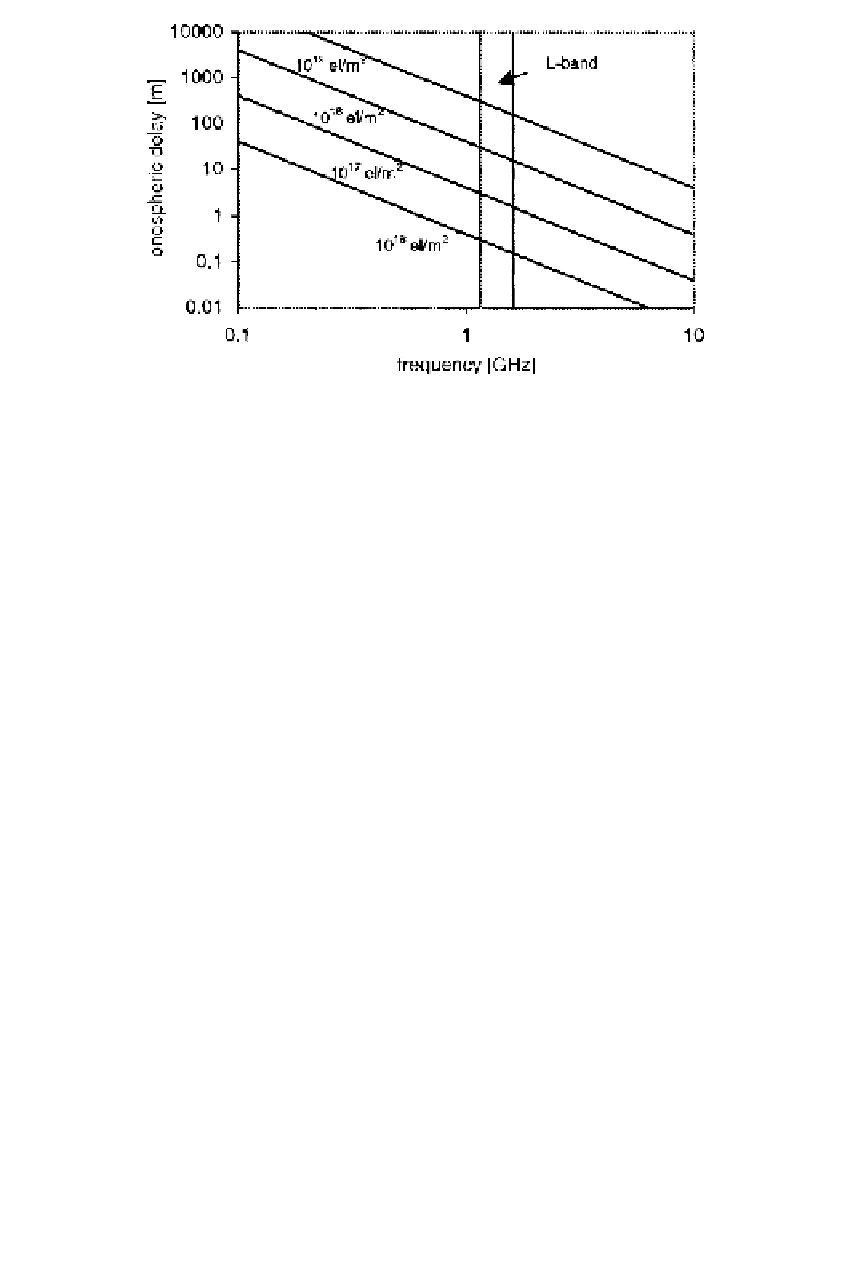
Figure 6.14
Ionospheric range correction.
Lin
—
0
——
No
PgE
amplitude and phase scintillation. These scintillation effects generally require a min-
imum receiver bandwidth of at least 3 Hz under severe fading and phase jitter condi-
tions. Semicodeless L2 receivers generally do not perform well under conditions of
severe phase scintillation due to the required narrow bandwidth of such receivers. If
the receiver bandwidth is set to 1 Hz to deal with the rate of change of the geometric
Doppler shift, and if the ionosphere causes an additional 1 Hz shift, the receiver might
lose phase lock. Assuming a maximum TEC of 10
18
el/m
2
, a change of 1.12% TEC
[21
causes a single-cycle change in L1.
6.6 IONOSPHERIC SOLUTIONS
The primary purpose of multiple frequencies is to neutralize the effect of the iono-
sphere on position determination. Functions of the dual-frequency observables are
readily available that do not depend on the ionosphere.
6.
6.1 Single Frequencies and the Broadcast Ionospheric Model
To support point positioning for single-frequency users, the broadcast message con-
tains eight ionospheric model coefficients for computing the ionospheric group delay
along the signal path. The algorithm was developed by Klobuchar (1987) and is listed
in Table 6.1. In addition to the broadcast coefficients, other input parameters are the
geodetic latitude and longitude of the receiver, the azimuth and elevation angle of
the satellite as viewed from the receiver, and the time. Note that several angular argu-
ments are expressed in semicircles (
SC
). All auxiliary quantities in the middle portion
of the table can be computed one at a time starting from the top. The function in the
third part of the table has been multiplied with the velocity of light, in order to yield