Global Positioning System Reference
In-Depth Information
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
[14
Lin
—
0.0
——
Nor
PgE
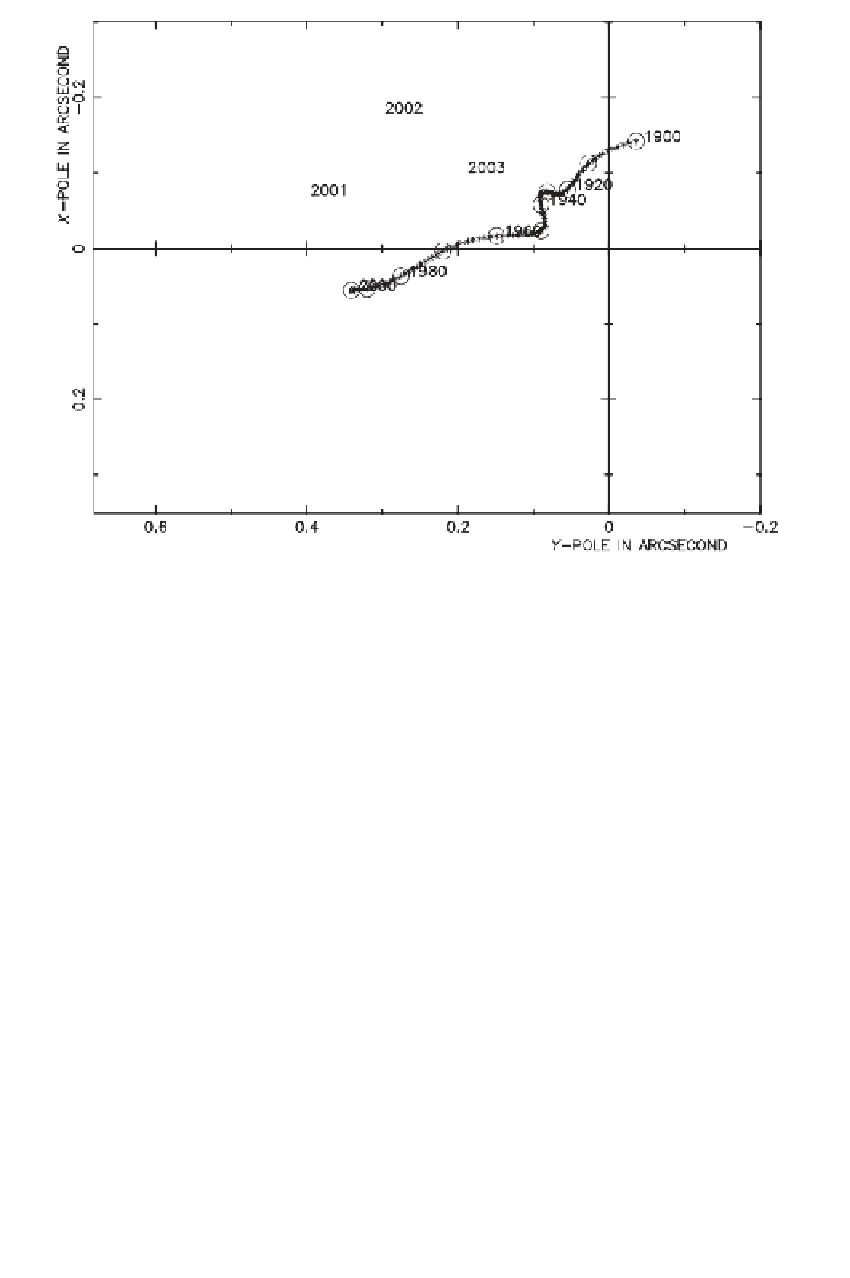
Figure 2.1 Polar motion, 2001-2003.
The solid line represents the mean pole displacement,
1900-2000. (Courtesy of the International Earth Orientation Service [IERS], Paris Obser-
vatory.)
[14
the natural choice for the origin of the CTRS because satellite dynamics are sensi-
tive to the center of mass (whole earth plus oceans and atmosphere). A particular
realization of a CTRS is the ITRF. The IERS maintains the ITRF using extrater-
restrial data from various sources, such as GPS, very long baseline interferometry
(VLBI), satellite laser ranging (SLR), and Doppler orbitography and radioposition-
ing integrated on satellite (DORIS). GPS is a viable tool for defining a global ref-
erence frame either alone or in combination with the other systems (Heflin et al.,
2002). Because the motions of the deformable earth are so complex, there is a need
to identify the sites that are part of the solution and, because of evolving data reduc-
tion techniques, the IERS publishes updated ITRF solutions. These are designated by
adding the year; e.g., ITRF96, ITRF97, and ITRF00. Transformation parameters for
the family of ITRFs have been estimated and are available from the IERS. Details on
ITRF transformations are found in Soler and Marshall (2002) and the literature listed
therein.
An ITRF-type of reference frame is also called an ECEF frame. We denote an
ECEF frame by
(
x
)
and the coordinate triplet by
(x,y,z)
. The
z
axis as defined by
the IERS is the origin of the polar motion coordinate system. The
x
and
y
axes define
the terrestrial equatorial plane. In order to maintain continuity with older realizations,
the
x
axis lies in what may be loosely called the Greenwich meridian.