Global Positioning System Reference
In-Depth Information
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
[14
Lin
—
0.0
——
Nor
PgE
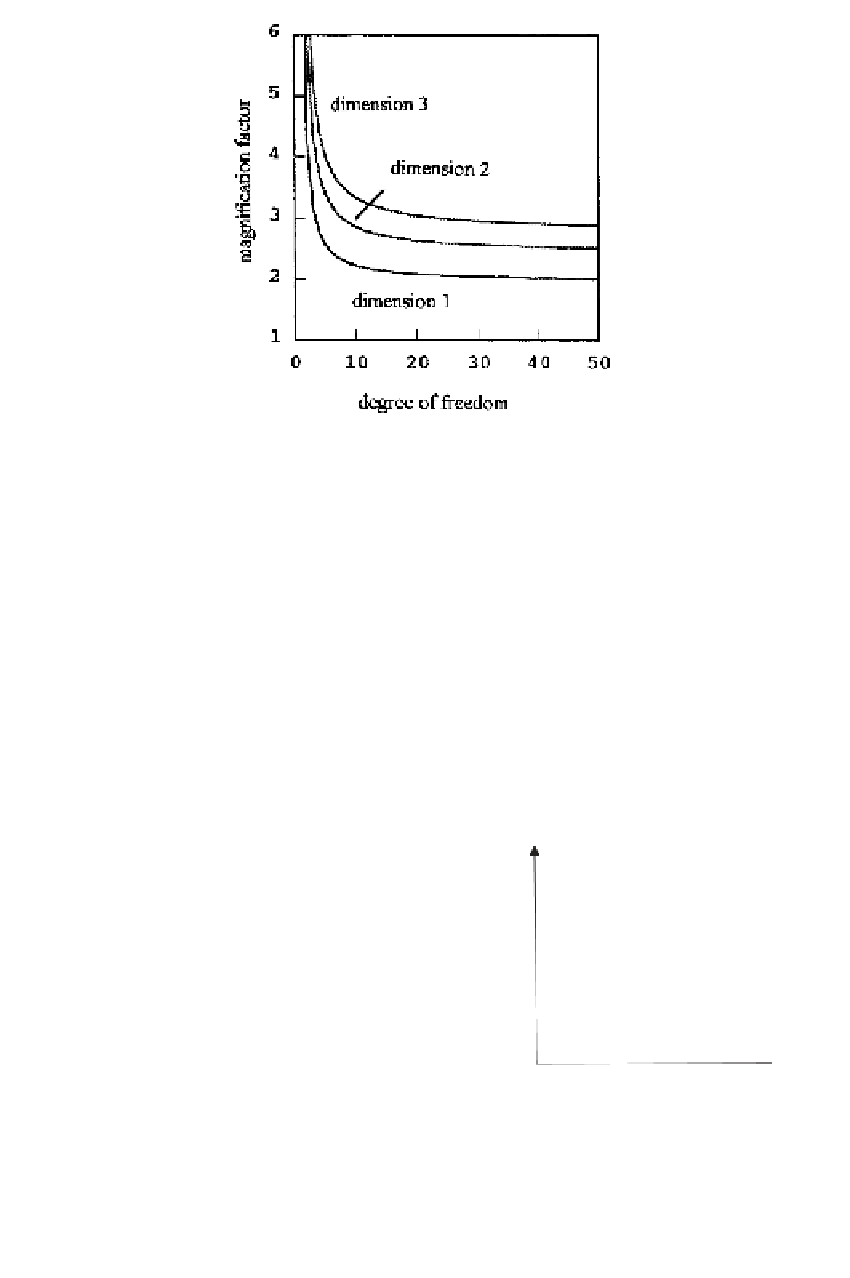
Figure 4.4
Magnification factors for confidence regions.
The values refer to
α =
0
.
05.
Th
e eigenvectors of
Q
i
determine the directions of the semiaxes, and the eigenvalues
de
termine their lengths. Rather than computing the vectors explicitly, we choose to
compute the rotation angle
ϕ
by comparing coefficients from quadratic forms. Figure
4.5 shows the rotational relation
cos
ϕ
y
i
sin
ϕ
z
i
=
(4.300)
[14
−
sin
ϕ
cos
ϕ
an
d Equations (4.295) and (4.299) give the two quadratic forms
y
i
Q
i
y
i
=
z
i
Λ
i
z
i
(4.301)
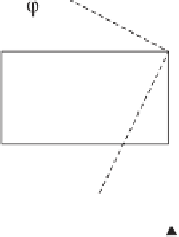
Figure 4.5 Rotation of the principal axis coor-
di
nate system.