Information Technology Reference
In-Depth Information
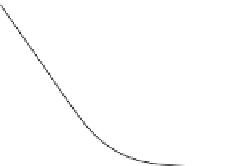
Fig. 5.1
American put option
Denoting by
T
t,T
the set of all stopping times for
S
t
with values in the interval
(t, T )
, the value of an American option is given by
τ
∈
T
t,T
E
e
−
r(τ
−
t)
g(S
τ
)
s
.
V(t,s)
:=
sup
|
S
t
=
(5.1)
As for the European vanilla style contracts, there is a close connection between
the probabilistic representation (
5.1
) of the price and a deterministic, PDE based
representation of the price. We have
Theorem 5.1.1
Let v(t,x) be a sufficiently smooth solution of the following system
of inequalities
BS
v
∂
t
v
−
A
+
rv
≥
0
in J
× R
,
g(e
x
)
v(t,x)
≥
in J
× R
,
(5.2)
BS
v
(∂
t
v
−
A
+
rv)(g
−
v)
=
0
in J
× R
,
g(e
x
)
v(
0
,x)
=
in
R
.
Then
,
V(T
−
t,e
x
)
=
v(t,x)
.
A proof can be found in [15], we also refer to [98] for further details. For each
J
there exists the so-called
optimal exercise price s
∗
(t)
t
∈
∈
(
0
,K)
such that for all
s
∗
(t)
the value of the American put option is the value of immediate exercise,
i.e.
V(t,s)
=
g(s)
, while for
s>s
∗
(t)
the value exceeds the immediate exercise
value, see Fig.
5.1
.
s
≤
s>s
∗
(t)
The region
C
:= {
(t, s)
|
}
is called the
continuation
c
of
region
and the complement
is the
exercise region
. Since the optimal exercise
price is not known a priori, it is called a free boundary for the associated pricing PDE
and the problem of determining the option price is then a
free boundary problem
.
Note that the inequalities (
5.2
) do not involve the free boundary
s
∗
(t)
.
C
C
Remark 5.1.2
In the Black-Scholes model, the derivative of
V
at
x
=
s
∗
(t)
is con-
tinuous which is known as the
smooth pasting
condition. This does not hold for pure
jump models.






































Search WWH ::

Custom Search