Graphics Reference
In-Depth Information
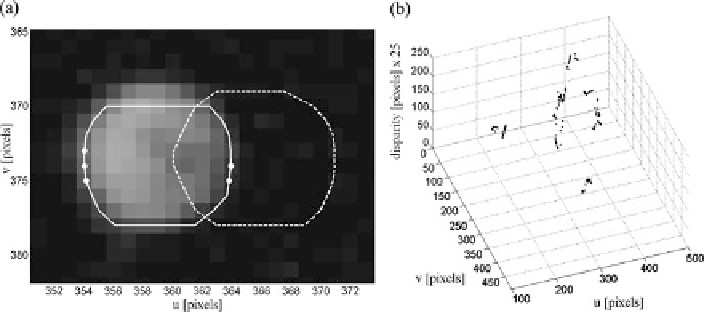
Fig. 1.21
(
a
) Contour segment-based stereo analysis of a ball of 10 cm diameter, painted in the
same colour as the floor. The
solid contour
is valid for the
right image
,the
dashed contour
for
the
left image
of the stereo pair. Image points for which disparity values have been computed are
denoted by white
filled circles
.(
b
) Disparity map of the same scene as shown in Fig.
1.20
, obtained
with the correlation-based real-time stereo algorithm described in Franke and Joos (
2000
), which
has been applied to the stereo pair of absolute difference images. Obviously, the disparity map is
more noisy than the one obtained with the CBS algorithm (cf. Fig.
1.20
b). This correlation-based
stereo vision algorithm, however, does not necessarily depend on reference images of the scene
dark from bright image regions. Thus, disparity information is obtained from
N
T
+
1
isophotes in the pair of absolute difference images. These isophotes are determined
by
θ
0
and the chosen values of
θ
(q
a
.
Figure
1.18
a displays contours extracted from the stereo image pair with a rela-
tively high binary threshold value of
θ
0
=
100. In Fig.
1.18
b the contours extracted
from the stereo image pair with
θ
0
=
50 are partially determined by shadows cast by
the object rather than by the object itself (solid and dashed contours, respectively).
For these parts of the contours no disparity value is computed, as the gradient at
the corresponding positions in the image is too small to exceed the threshold
θ
grad
that depends on the minimum shading contrast; in our experiments we set
θ
grad
=
1.
Hence, the contour extraction procedure is repeated with an adaptive threshold de-
rived from the intensity histogram of the bounding box of the solid contour, yield-
ing the dotted and the dashed-dotted contours, which are now fully characterised by
the object boundary. Figure
1.20
shows the resulting disparity map based on single
contour points and based on contour segments with length
L
S
=
8. In the second
example, we set the thresholds to the not very restrictive values
θ
corr
=
0
.
7 and
θ
slope
=
0
.
5, i.e. two corresponding contour segments may be oriented at an angle of
up to 45
◦
, provided that they are running at an angle of more than 30
◦
with respect
to the image rows. Note that changing these thresholds does not change the disparity
value of a certain three-dimensional point but may only add it to or remove it from
the disparity map. For this rather complex scene, the computation time of our C++
implementation of the CBS algorithm amounts to 80 ms on a 1
.
8 GHz Pentium IV
processor. Figure
1.20
illustrates that the contour segment-based method yields a
significantly less noisy disparity image than the contour point-based method. Com-
Search WWH ::

Custom Search