Graphics Reference
In-Depth Information
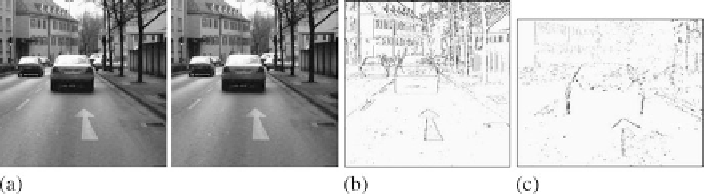
Fig. 1.17
(
a
) Pair of stereo images. (
b
) Classified image pixels. The pixel brightness encodes the
class index. (
c
) Distance image. The pixel brightness is proportional to the distance. Images are
from Franke et al. (
1999
)
pairs as potentially corresponding pixels. As an alternative, they propose a method
which determines a measure of the uniqueness of the appearance of a small im-
age region around a given pixel. Their measure is based on the maximum cross-
correlation coefficient between the regarded image region and neighbouring image
regions. If this value is low, the corresponding pixel is highly unique and is re-
garded as a feature point, where only regions with strong grey value gradients are
taken into account. Zhang and Gimel'farb (
1999
) show experimentally that both ap-
proaches behave in a similar manner with respect to image rotation, scaling, shift,
and contrast adaptations.
Medioni and Nevatia (
1985
) propose an edge-based framework for establishing
correspondences between pairs of stereo images. Using the method of Nevatia and
Babu (
1980
), they detect edge pixels using appropriate filters for different edge ori-
entations; a non-maximum suppression of the detected edge pixels is performed,
gaps are filled, and linear segments are adapted. Medioni and Nevatia (
1985
)es-
tablish correspondences between these segments based on the coordinates of the
points at which they start and terminate, their direction in the image plane, and their
contrast. At this point it may be necessary to violate the uniqueness constraint and
allow correspondences between single edge segments in the first image and multiple
edge segments in the second image, as some edge segments may become decom-
posed into several parts. Another edge-based approach, where correspondences are
established between groups of connected edges, is proposed by Baker and Binford
(
1981
).
An example of a real-time feature-based stereo algorithm applied in the con-
text of a vision-based driver assistance system is outlined by Franke and Kutzbach
(
1996
) and Franke et al. (
1999
). According to Franke et al. (
1999
), each pixel is
assigned to a class based on the grey values of its four nearest neighbours. The class
assignment depends on the information about the relative intensities of the regarded
pixel and its neighbours, i.e. which neighbour is significantly brighter or darker or of
similar intensity. Essentially, the pixel classes denote edges and corners of different
orientations. Correspondences are established by identifying pixels that belong to
the same class and are located on corresponding epipolar lines (cf. Fig.
1.17
). In the
case of several possible correspondences, the pair of corresponding points with the
Search WWH ::

Custom Search