Graphics Reference
In-Depth Information
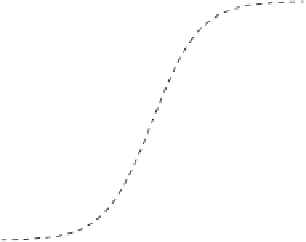
Fig. 1.11
True step response
H(t,σ)
with
σ
=
1(
solid
curve
) and approximation by
the funct
ion
S(t, σ)
with
σ
=
σ
√
π/
8(
dashed curve
)
In order to achieve an acceptable computational performance of the implementa-
tion we approximate the Gaussian error integral by the function
S(t,
σ)
according
˜
to
I(x,y)
≈
S(x
cos
α
1
+
y
sin
α
1
,
σ)S(x
cos
α
2
+
˜
y
sin
α
2
,
σ)
˜
2
with
S(t,
σ)
˜
=
−
1
.
(1.89)
e
−
t/σ
1
+
The function
S(t,
σ)
is also of sigmoidal shape and similar to the logistic function
˜
+
e
−
t
)
.In(
1.89
),
L(t)
=
σ
is a scaling factor which is p
ropo
rtional to the width
parameter
σ
of the Gaussian PSF
G(t, σ )
. Setting
1
/(
1
σ
=
σ
√
π/
8 yields an identical
slope of
H(t,σ)
and
S(t,
σ)
at
t
˜
=
0 (Fig.
1.11
). Note that the function
S(t,
σ)
˜
defined in (
1.89
) can also be expressed as
tanh
t
2
.
S(t,
σ)
˜
=
(1.90)
σ
˜
To determine the discrete model
I
uv
of the image, assume a linear camera response
is assumed, described by the gain
β
and offset
γ
and the sample
I(x,y)
at the
integer-valued pixel positions
(u, v)
according to
I
uv
=
β I(u
+
u
0
,v
+
v
0
)
+
γ
with
u, v
∈ N
and
u
0
,v
0
∈ R
.
(1.91)
Again this is an approximation, as each pixel of the sensor actually performs an
integral over the area that it covers. Since the corner model has been fixed to
the previously detected corner point, we have to move the corner with respect to
the centre pixel of
I
uv
. In order to obtain the subpixel accurate corner position
(u
0
,v
0
)
of the corner in the input image
I
uv
we find the simulated corner image
I
uv
that is the best approximation of
I
uv
in the least-mean-squares sense by deter-
mining
I
uv
2
I
uv
−
arg
min
u
0
,v
0
,β,γ, σ,α
1
,α
2
(1.92)
u,v
using the Levenberg-Marquardt algorithm. For clarity, the dependence of
I
uv
on
u
0
,
v
0
,
β
,
γ
,
σ
,
α
1
, and
α
2
has been omitted in (
1.92
). The gain and offset are ini-
tialised from the minimum and maximum grey values in
I
uv
. The angles
α
1
and
α
2
˜





























Search WWH ::

Custom Search