Graphics Reference
In-Depth Information
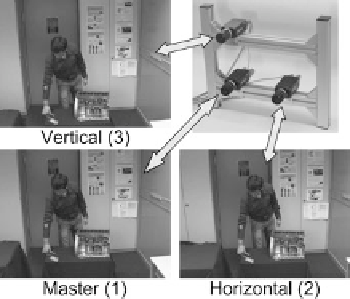
Fig. 7.6
Arrangement of the
trinocular camera system
requirement is due to the fact that a calibration in the industrial environment, e.g.
by a robot showing a calibration target to the cameras, would require a stop of the
production line, which is unacceptable in practise. Furthermore, an appropriately
constructed trinocular small-baseline system of three cameras mounted inside a sin-
gle housing remains mechanically stable for a considerable period of time, i.e. sev-
eral years. In contrast, multi-view systems built up of several disconnected cameras
regularly need an in situ recalibration due to mechanical or thermal stress, which is
unacceptable in an industrial environment. Furthermore, if the camera system needs
to be exchanged, installing a single-housing calibrated camera system of moderate
size is much easier and less expensive than setting up and calibrating a system of
many distributed cameras—for the latter, a stop of the production line would again
be necessary.
In the proposed system, the multiocular contracting curve density (MOCCD)-
based techniques (cf. Sect.
2.2.3
) directly use the three synchronously acquired im-
ages, whereas the scene flow algorithm uses the images as two stereo pairs. The
two stereo pairs are perpendicularly arranged in order to circumvent the aperture
problem, such that we have a horizontal and a vertical stereo pair.
Since it is desired to obtain metric measurements from the images, the intrinsic
and extrinsic parameters of the camera system need to be known. Therefore the
cameras are calibrated (Krüger et al.,
2004
), and the image sequences are rectified
using the method of Fusiello et al. (
2000
) prior to applying the stereo algorithm. The
three-dimensional points determined by the scene flow algorithm of the horizontal
and the vertical stereo pair are both transformed back into the coordinate system
of the master camera (cf. Fig.
7.6
). This yields three-dimensional points from all
three cameras in the same coordinate system as the one used by the MOCCD-based
techniques.
7.4.2 Data Set Used for Evaluation
The evaluation is based on nine test sequences which display five different test per-
sons performing complex movements similar to motion patterns typically occurring
Search WWH ::

Custom Search