Graphics Reference
In-Depth Information
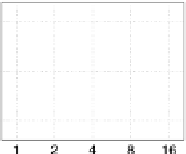
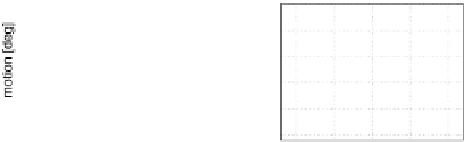
Fig. 7.5
Evaluation results, displayed column-wise for the three test sequences. 'Motion' refers
to the pose variation between subsequent images
wise for the three test sequences in the first row of Fig.
7.5
. The second row shows
the mean errors and standard deviations of the translational motion components
U
obj
(circles),
V
obj
(squares), and
W
obj
(diamonds) per time step. For each value of
n
,the
left triple of points denotes the forearm and the right triple the hand. The third row
displays the mean errors and standard deviations of the rotational motion compo-
nents
ω
p
(circles) and
ω
o
(squares). For each value of
n
, the left pair of points
denotes the forearm and the right pair the hand.
The Euclidean distances between the estimated and true reference points typi-
cally amount to 40-80 mm and become as large as 150 mm in the third sequence,
which displays a pointing gesture (cf. Fig.
7.4
). Being independent of
n
, the values
are comparable to those reported by Hahn et al. (
2007
,
2010a
). The deviations mea-
sured for our system are comparable to the translational accuracy of about 70 mm
achieved by the stereo-based upper body tracking system proposed by Ziegler et al.
(
2006
). Furthermore, the average joint angle error of 25
.
7
◦
determined in that work
for the lower arm is equivalent to a translational error of about 100 mm, using our
assumed forearm length of 220 mm, which is slightly higher than, but comparable
to, the deviations obtained for our system.
The discrepancies observed for our system are to some extent caused by a shift
of the model along the longitudinal object axis but also by the fact that the lengths
of the partial models of the forearm and the hand are fixed to 220 and 180 mm,





























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search