Graphics Reference
In-Depth Information
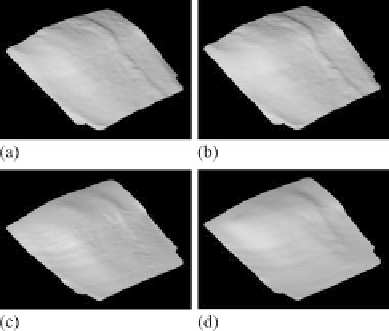
Fig. 6.30
Three-dimensional reconstruction result for poorly known reflectance parameters (con-
nection rod example, cf. also Fig.
6.24
). (
a
) Reflectance function with
σ
2
=
0 (i.e. specular spike
omitted) and correct parameters for the specular lobe. Polarisation angle data are used. (
b
)Re-
flectance function with
σ
2
=
0and
σ
1
and
m
1
decreased by a factor of 0
.
5, respectively. Polarisa-
tion angle data are used. (
c
), (
d
) Same reflectance parameters as in (
a
)and(
b
), but without taking
into account polarisation angle data
dimensional profile shown in Fig.
6.30
b. If furthermore the polarisation information
is neglected, the three-dimensional profiles shown in Figs.
6.30
c-d are obtained.
Compared to the reconstruction results shown in Fig.
6.24
obtained with the cor-
rect reflectance parameters, the three-dimensional profiles shown in Fig.
6.30
are
tilted towards the light source. Hence, the SfPRD algorithm attempts to generate the
large pixel brightness values observed in the images for specular reflections by de-
creasing the incidence angle between the normals of the corresponding surface parts
and the direction of incident light. However, we observe a graceful degradation of
the three-dimensional reconstruction result, even when the assumed reflectance pa-
rameters strongly deviate from their true values.
6.3.5 Inspection Based on Integration of Photometric Image
Information and Active Range Scanning Data
Sections
6.3.3
and
6.3.4
describe a methodical framework for three-dimensional
surface reconstruction which requires that the illumination conditions as well
as the material-specific reflectance properties are known. Alternatively, a three-
dimensional surface reconstruction can be obtained by the triangulation-based eval-
uation of fringe or coded patterns projected on the surface, as described in detail
e.g. in the surveys by Batlle et al. (
1998
) and Beraldin (
2004
). However, it is well
known that the three-dimensional surface reconstruction results provided by such
active range scanning systems are usually fairly noisy and tend to display gaps for
which no depth data are available when strongly specular surfaces are regarded. This
Search WWH ::

Custom Search