Graphics Reference
In-Depth Information
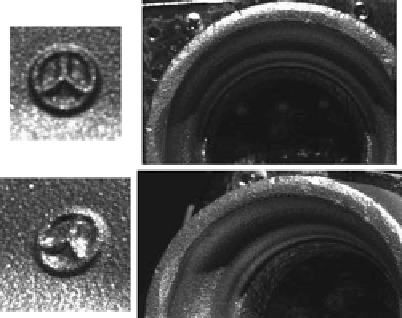
Fig. 6.23
Stereo image pairs
of the star pattern (
left
)and
the ring-shaped flange (
right
).
These examples illustrate
that, due to the specular
reflectance behaviour of the
surface, corresponding
surface parts do not
necessarily have a similar
appearance in the images
ences. Due to the small size of the surface defects, the accuracy of the tactile depth
measurement only amounts to 0
.
05 mm. The true depth of the dent 1 is 1
.
2 mm, the
reconstructed depth 1
.
3 mm. Dents 2 and 3 each have a true depth of 0
.
25 mm, while
the corresponding depth on the reconstructed surface profile amounts to 0
.
30 mm
and 0
.
26 mm, respectively. On large scales, our three-dimensional reconstruction
correctly displays a flat surface. These comparisons indicate a good correspondence
between the true surface and our reconstruction results.
6.3.4 Inspection Based on Specular Stereo
In this section the specular stereo method of Wöhler and d'Angelo (
2009
) described
in Sect.
5.4
is applied to the three-dimensional reconstruction of rough metallic
surfaces displaying a weak diffuse reflection component along with considerable
specular lobes and spikes. The same experimental setup as in Sect.
6.3.3.2
is used.
The surface of the connection rod, a cast iron surface displaying a star pattern, and
the ring-shaped surface part of the flange are examined. The first and third examples
have also been regarded in Sect.
6.3.3.2
. The presentation in this section is adopted
from Wöhler and d'Angelo (
2009
).
6.3.4.1 Qualitative Discussion of the Three-Dimensional Reconstruction
Results
Figure
5.20
displays a stereo image pair of the connection rod, while in Fig.
6.23
the stereo image pairs of the star pattern and the ring-shaped flange examples are
shown. The appearance of the surface of the star pattern differs so strongly between




Search WWH ::

Custom Search