Graphics Reference
In-Depth Information
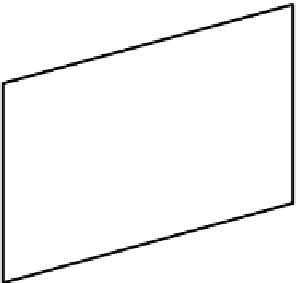
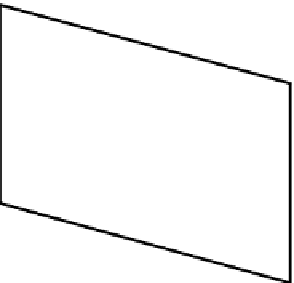
Fig. 1.3
In each of the two images, the epipolar lines form a pencil of lines. The
intersection
points
correspond to the epipoles
e
1
and
e
2
. Corresponding pairs of epipolar lines are numbered
consecutively
only a least-squares solution exists due to noise in the measurements of
S
1
x
and
S
2
˜
˜
x
.
The solution for
W
˜
x
corresponds to the singular vector of the matrix
G
normalised
to unit length which belongs to the smallest singular value (Hartley and Zisserman,
2003
).
However, as merely an algebraic error rather than a physically motivated geomet-
ric error is minimised by this linear approach to determine
W
x
, Hartley and Zisser-
man (
2003
) suggest a projective reconstruction of the scene points by minimisation
of the reprojection error in the sensor coordinate system. While
S
1
S
2
x
cor-
respond to the measured image coordinates of a pair of corresponding points, the
estimated point correspondences which exactly fulfil the epipolar constraint (
1.19
)
are denoted by
S
1
x
and
x
(e)
and
S
2
x
(e)
. We thus have
S
2
x
(e)T
F
S
1
x
(e)
0. The point
S
1
x
(e)
˜
˜
˜
˜
=
˜
l
and
l
.
S
1
S
2
x
(e)
S
2
lies on an epipolar line
˜
lies on the corresponding epipolar line
l
and
l
, the epipolar
S
1
S
2
However, for any other pair of points lying on the lines
l
T
F
S
1
l
S
2
S
1
x
(e)
S
2
x
(e)
constraint
=
0 is also fulfilled. Hence, the points
˜
and
˜
have
l
)
to be determined such that the sum of the squared Euclidean distances
d
2
(
S
1
x
,
S
1
˜
l
)
in the sensor coordinate system between
l
and between
and
d
2
(
S
2
x
,
S
2
S
1
S
1
˜
x
and
˜
l
, respectively, i.e. the reprojection error, is minimised. Here,
d(
S
l
)
S
2
S
2
x
,
S
x
and
˜
˜
l
.Thismin-
imisation approach is equivalent to bundle adjustment (cf. Sect.
1.3
) as long as the
distance
d(
S
l
orthogonal to
S
S
S
denotes the distance from the point
x
to the line
˜
l
)
is a Euclidean distance in the image plane rather than merely in
the sensor coordinate system, which is the case for image sensors with zero skew
and square pixels.
According to Hartley and Zisserman (
2003
), in each of the two images the epipo-
lar lines in the two images form a 'pencil of lines', which is an infinite number of
lines which all intersect in the same point (cf. Fig.
1.3
). For the pencils of epipo-
lar lines in images 1 and 2, the intersection points correspond to the epipoles
x
,
S
˜
e
1
˜
and
e
2
. Hence, the pencil of epipolar lines can be parameterised by a single param-
eter
t
according to
˜
l
(t)
in image 2 then
follows directly from the fundamental matrix
F
. Now the reprojection error term
l
(t)
. The corresponding epipolar line
S
1
S
2
















Search WWH ::

Custom Search