Graphics Reference
In-Depth Information
Ta b l e 6 . 2
Estimated pose
and ground truth (GT) for the
oil cap example
Parameter
Pose 1
GT 1
Pose 2
GT 2
Roll (
◦
)
233
.
2
234
.
5
230
.
7
232
.
1
Pitch (
◦
)
1
.
3
2
.
3
0
.
9
2
.
4
Ya w (
◦
)
57
.
3
55
.
2
56
.
8
56
.
0
t
x
(mm)
14
.
7
14
.
7
15
.
0
14
.
8
t
y
(mm)
2
.
1
2
.
8
2
.
0
2
.
5
t
z
(mm)
512
.
9
509
.
2
512
.
7
509
.
2
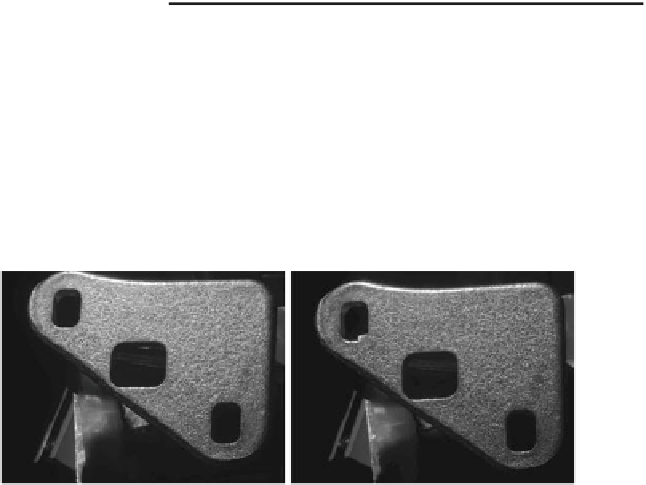
Fig. 6.7
Intensity images of the door hinge for pose 1 (
left
) and pose 2 (
right
). Grey levels are
displayed in logarithmic scale
that the object pose can be determined with an accuracy of 1
◦
-2
◦
for the rotation
angles, some tenths of a millimetre for the lateral translations, and several millime-
tres or about 1 % for the object distance. Small deviations of the rotation angles
can be compensated by correspondingly adjusting the albedo factor
ρ
, leading to a
lower accuracy of the rotation angles, compared to the rubber example. Due to the
somewhat ill-defined edges the pose estimation fails when only edge information is
used, as no convergence of the minimisation routine is achieved.
For the oil cap example, it is possible to directly compare the results of the
method of Barrois and Wöhler (
2007
) to those of the monocular edge-based tem-
plate matching method proposed by von Bank et al. (
2003
), since in that work the
same object and the same CAD model are regarded. The deviation of the rotation
angles estimated by von Bank et al. (
2003
) from the corresponding ground truth
is typically around 1
◦
-2
◦
but may also become larger than 3
◦
. In contrast to the
method of Barrois and Wöhler (
2007
), it is assumed by von Bank et al. (
2003
) that
the distance to the object is known, i.e. only five rather than six degrees of freedom
are estimated by von Bank et al. (
2003
). On the other hand, that method does not
require a priori information about the object pose.
In a further experiment another automotive part is regarded, a door hinge consist-
ing of cast metal with a rough and strongly specular surface (cf. Fig.
6.7
). The light
from the point light source is specularly reflected into the camera. The Canny edge
detector yields a very large number of edges (cf. Fig.
6.8
), thus providing no reliable
information about the object pose. As a consequence, our approach fails when we

Search WWH ::

Custom Search