Graphics Reference
In-Depth Information
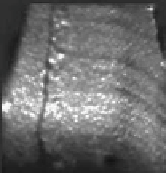
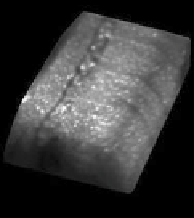
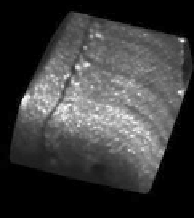
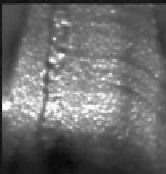
Fig. 5.20
Observed (
left
) vs. rendered (
middle
,
right
) images for the connection rod example in
camera coordinate system
C
1
and in rectified coordinate system
R
2
, respectively, shown before the
first iteration cycle and after 8 iteration cycles
a more detailed experimental evaluation in the application scenario of industrial
quality inspection.
5.5 Combination of Shape from Shading and Active Range
Scanning Data
In application domains such as industrial metrology or remote sensing, an alterna-
tive to passive stereo image analysis is active range scanning. In industrial metrol-
ogy, a state-of-the-art approach is the projection of structured light, where the three-
dimensional shape of the surface is inferred from the deformations of the projected
light pattern observed in the camera image (Batlle et al.,
1998
). An important remote
sensing technique is light detection and ranging (LIDAR), which relies on depth
measurement based on the time of flight of emitted light pulses (Schowengerdt,
2006
).
Actively scanned three-dimensional data commonly have a high absolute depth
accuracy but an effective lateral resolution which is lower than that of images ac-
quired from the same viewpoint. For example, range scanning data obtained by the
projection of structured light tend to display a considerable amount of noise on small
spatial scales, which results in a decreased effective lateral resolution. LIDAR mea-
surements usually have a high depth accuracy, but the lateral density of the measured
points may be low except when the surface is scanned several times.











Search WWH ::

Custom Search