Graphics Reference
In-Depth Information
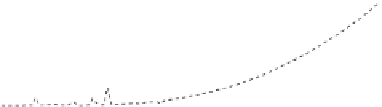
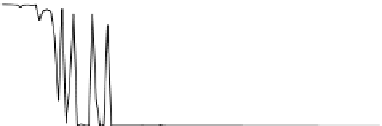
Fig. 5.3
Dependence of
E
reconstr
(
upper diagram
),
E
reprojection
(
lower diagram
,
dashed curve
,
left axis
), and
E
defocus
(
lower diagram
,
solid
curve
,
right axis
)onthe
weight parameter
α
denoting the root-mean-square deviation between the measured two-dimensional
feature positions
S
i
I
i
T
−
1
into the
image plane, and the reconstructed three-dimensional scene points
W
x
k
reprojected
into the images using the reconstructed camera transforms
C
W
T
. The number of im-
ages is denoted by
L
.
The defocus error denotes the root-mean-square deviation between measured and
expected radii
σ
ik
of the Gaussian PSFs according to
S
i
x
k
in the sensor plane after transformation by
L
K
S
C
i
W
T
W
x
k
z
−
σ
ik
2
.
1
KL
E
defocus
=
(5.4)
i
=
1
k
=
1
Figure
5.3
(bottom) shows the relation between the weight parameter
α
, the repro-
jection error
E
reprojection
, and the defocus error
E
defocus
.For
α>
0
.
3 the defocus
error stabilises to 0.58 pixels per feature. Larger
α
values lead to a stronger in-
fluence of the depth from defocus values on the optimisation result, leading to an
increasing reprojection error
E
reprojection
due to the inaccuracy of the estimated
σ
ik
values.
Although the depth values derived by depth from defocus are noisy, they are
sufficient to establish a reasonably accurate absolute scale. Hence, this first eval-
uation shows that the combined approach is able to reconstruct scenes at absolute
scale without prior knowledge. As shown in Sect.
4.2.3.4
, the described approach is
favourably applied in the close-range domain (
z
∼
1 m) using standard video cam-
10
6
pixels).
For larger distances around 10 m, the focal length req
ui
red to obtain a comparable
relative accuracy of absolute depth is proportional to
√
z
, implying a narrow field of
view of less than 7
◦
and thus rendering the application of the approach unfeasible
from a practical point of view as structure from motion becomes unstable for small
intersection angles.
Further experiments regarding several real-world objects are described in the fol-
lowing paragraphs. Here we report results obtained based on the image sequences
eras and lenses (
f
below
∼
20 mm, pixel size
∼
10
μ
m, image size
∼







































































































Search WWH ::

Custom Search