Graphics Reference
In-Depth Information
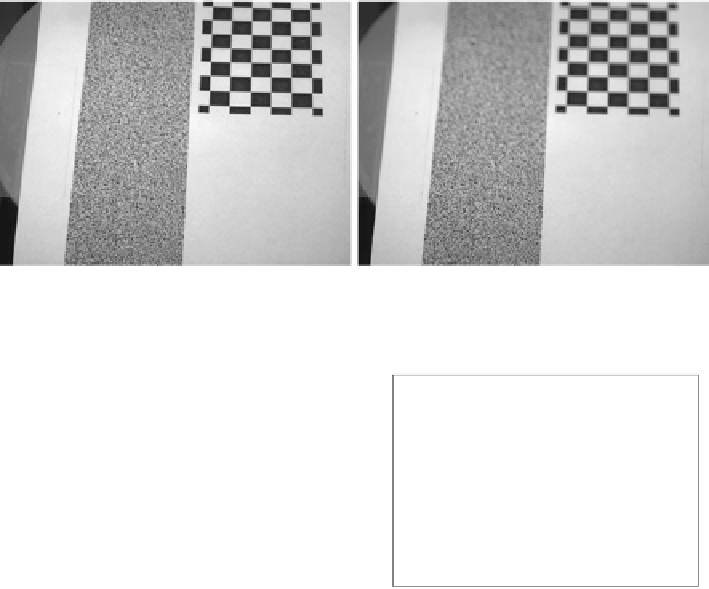
Fig. 4.9
Pixel-synchronous image pair (
left
:
κ
=
8,
right
:
κ
=
2) used for calibration of the
depth-defocus function with a stationary camera
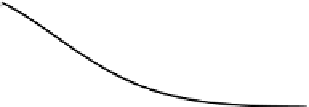
Fig. 4.10
Depth-defocus
function obtained with a
stationary camera based on
the calibration pattern shown
in Fig.
4.9
Moving Camera
The description of the moving camera setting is adopted from
Kuhl et al. (
2006
). Calibrating the depth-defocus function
S
(z)
for a given lens cor-
responds to determining the parameters
φ
1
,
φ
2
,
φ
3
, and
f
in (
4.15
). This is achieved
by taking a large set of measured
(σ, z)
data points and performing a least-squares fit
to (
4.15
), where
z
is the distance from the camera and
σ
the radius of the Gaussian
PSF
G
σ
used to blur the well-focused image according to
I
ij
=
G
σ
∗
I
if
i
.
(4.16)
Here,
I
if
i
represents a small region of interest (ROI) around feature
i
in image
f
i
in
which this feature is best focused, and
I
ij
an ROI of equal size around feature
i
in
image
j
.
For calibration, an image sequence is acquired while the camera approaches a
calibration rig displaying a chequerboard. The sharp black-and-white corners of the
chequerboard are robustly and precisely detectable with the method of Krüger et
al. (
2004
), even in defocused images. Small ROIs around each corner allow the
estimation of defocus using their grey value variance
χ
. The better focused the
corner, the higher the variance
χ
.
It was found experimentally that the parameterised defocus model according
to (
4.15
) is also a reasonable description of the dependence of
χ
on the depth
z
.





















































































































































































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search