Graphics Reference
In-Depth Information
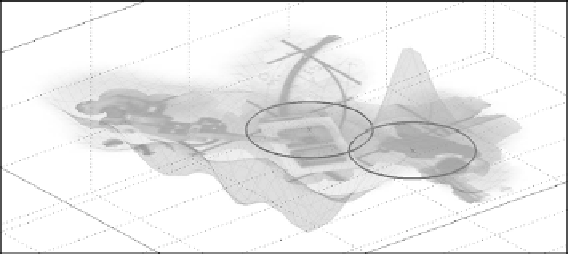
Fig. 2.22
Error function plot for minimisation, showing the error surface for
v
=
0
.
26 m s
−
1
,
r
=
0
.
53 m (
lower surface
), and
v
=−
0
.
79 m s
−
1
,
r
=
0
.
53 m (
upper surface
, values mirrored for
clearer display)
Fig. 2.23
Trajectory of the
tracked object (
dark grey
)
with annotated ground truth
(
light grey
)foratabletop
sequence
consistent trajectory. The trajectory of a moving object in a fairly simple tabletop
sequence as determined with the proposed algorithm is shown in Fig.
2.23
in com-
parison with the manually determined ground truth. This example demonstrates that
a moving object can be separated from stationary background objects. In Sect.
7.2
we provide a detailed quantitative evaluation of our method in a complex industrial
production scenario.

Search WWH ::

Custom Search