Graphics Reference
In-Depth Information
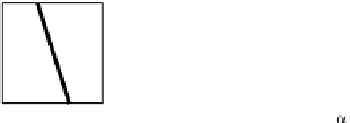
Fig. 2.18
(
a
) Relation between edge direction
δ
and normal velocity
φ
n
.(
b
) Definition of the
constraint line in
UV
space according to Schunck (
1989
), representing the configurations
(U, V )
which are consistent with the observed normal velocity
φ
n
gles, which are included in the model as internal degrees of freedom. In the course
of the adaptation process, three-dimensional points not previously determined to
belong to the object may be added to it while others may be rejected, resulting in a
robust behaviour with respect to errors of the preceding clustering stage. The optimi-
sation procedure is implemented as an M-estimator (Rey,
1983
). It is straightforward
to utilise the result of this three-dimensional pose estimation procedure as an initial-
isation for the appearance-based MOCCD technique described in Sect.
2.2.1.2
.
2.3.3.2 Estimation of the Temporal Pose Derivatives
Both motion components of a scene point parallel to the image plane can only be
recovered from the corresponding local pixel neighbourhood if the intensity pattern
around the pixel is corner-like. Edge-like intensity patterns only allow the determi-
nation of one velocity component, such as the component parallel to the epipolar
lines computed by the spacetime stereo algorithm (cf. Sect.
1.5.2.5
). This ambiguity
is a consequence of the well-known aperture problem (Horn,
1986
). Restricting the
stereo and motion analysis to corner-like image features (Franke et al.,
2005
)may
result in fairly sparse depth maps. If edge-like image features are evaluated, as is the
case in all image sequences regarded in this study, projecting the determined veloc-
ity component onto a line orthogonal to the local edge direction yields the normal
velocity
φ
n
, as depicted in Fig.
2.18
a. The angle
α
between the direction of the hor-
izontal epipolar lines and the direction of the normal velocity is given by
δ
=
tan
α
with
δ
as defined by (
1.121
) in Sect.
1.5.2.5
.
In the following, the translational velocity components of the object parallel to
the
x
,
y
, and
z
axes are denoted by
U
obj
,
V
obj
, and
W
obj
, respectively, and expressed
in metres per second. A two-dimensional space is spanned by the horizontal and ver-
tical velocity components
U
and
V
measured in the scene and expressed in metres
per second. This space is termed
UV
space. Given the observed normal velocity
φ
n
,
all consistent configurations
(U, V )
are represented by the corresponding constraint
line in
UV
space as defined by Schunck (
1989
)(cf.Fig.
2.18
b). Fermüller and Aloi-
monos (
1994
) extend the concept of constraint lines towards the analysis of 'image
displacement fields', i.e. optical flow and disparity, that arise from the motion of a































Search WWH ::

Custom Search