Graphics Reference
In-Depth Information
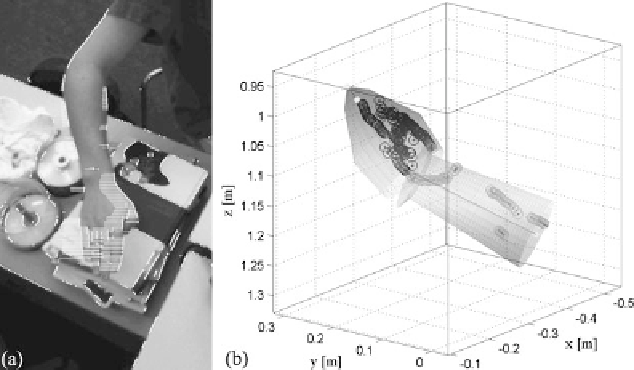
Fig. 2.17
(
a
) Image from a test sequence. Interest pixels for which stereo correspondences are
established are shown as
bright dots
. Epipolar velocities are indicated as
white lines
.(
b
) Three-di-
mensional model adapted to the point cloud
2.3.3.1 Scene Clustering and Model-Based Pose Estimation
An initial segmentation of the attributed three-dimensional point cloud extracted
with the spacetime stereo technique is obtained by means of a graph-based unsuper-
vised clustering technique (Bock,
1974
) in a four-dimensional space spanned by the
spatial coordinates and the epipolar velocity of the three-dimensional points. This
clustering stage generates a scene-dependent number of clusters, essentially sepa-
rating the moving object from the (stationary or differently moving) background.
For the first image of a sequence, the approximate position and orientation of the
object are estimated based on a principal component analysis of the corresponding
cluster points and used as initial values for the model adaptation procedure. For the
subsequent images, the initial pose parameters are inferred for the current time step
from the previous spatio-temporal pose estimation result, as described later.
We follow the ICP approach according to Zhang (
1992
) in order to fit a three-
dimensional model of the hand-forearm limb (which does not necessarily represent
the object at high accuracy) to the three-dimensional points determined to belong
to the moving foreground object by the preceding clustering stage. We utilise the
hand-forearm model introduced in Sect.
2.2.1.2
(Hahn et al.,
2007
,
2010a
), con-
sisting of a kinematic chain connecting the two rigid elements forearm and hand.
The model consists of five truncated cones and one complete cone (cf. Fig.
2.17
b).
The cone radii corresponding to the hand and the upper end of the forearm are both
set to 60 mm, and the lengths of the forearm and the hand are fixed to 220 mm
and 180 mm, respectively. The other radii are inferred from human anatomy, as de-
scribed in Sect.
2.2.1.2
. For each of the two rotationally symmetric model parts, the
five-dimensional vector
T
of translational and rotational pose parameters is deter-
mined. The relative orientation between forearm and hand is described by two an-
Search WWH ::

Custom Search