Graphics Reference
In-Depth Information
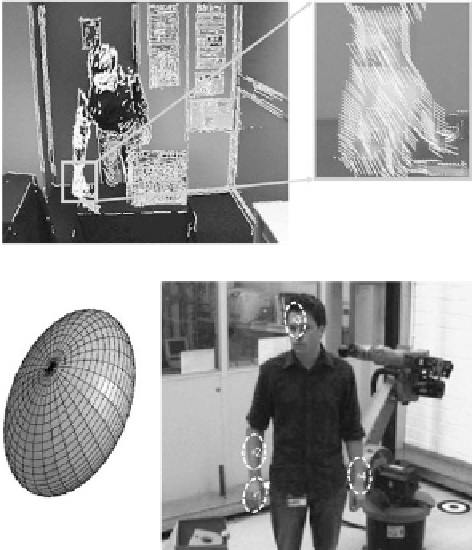
Fig. 2.14
Reprojected sparse
scene flow field
Fig. 2.15
Left
: Ellipsoid
model used for tracking
arbitrary objects or object
parts in the three-dimensional
point cloud.
Right
: Reprojection of four
tracked objects
determine the object motion in the image sequence. The optical flow field is com-
bined with the three-dimensional points from the blockmatching stereo algorithm
by Franke and Joos (
2000
) to obtain the scene flow field (cf. Fig.
2.14
). The velocity
component parallel to the depth axis is not computed.
At each time step, a graph-based clustering stage extracts all moving objects
from the scene flow field, essentially separating moving objects from the (stationary
or differently moving) background. The computed clusters are approximated as el-
lipsoids, and the three-dimensional ellipsoid pose
T
(c
x
,c
y
,c
z
,β)
T
=
is determined
(c
x
,c
y
,c
z
)
T
of the ellipsoid and the rotation an-
gle
β
around the depth axis are part of the pose vector
T
, since we assume that the
approximated objects are parallel to the image plane. The three-dimensional pose
update of all tracked objects is based on a two-stage three-dimensional extension of
the mean-shift algorithm according to Cheng (
1995
), Comaniciu et al. (
2000
). If a
tracked object is not moving for more than five time steps it is deleted.
=
(cf. Fig.
2.15
). Only the centre
c
2.3.2.2 Target Model
The target model
q
(id)
with the object index
id
is computed based on the first three-
dimensional ellipsoid pose
T
(id)
and is updated at every time step. It consists of
a one-dimensional histogram of greyscale values. To compute the histogram
q
(id)
we place a grid on the surface of the ellipsoid, the resolution of which is equal
Search WWH ::

Custom Search