Graphics Reference
In-Depth Information
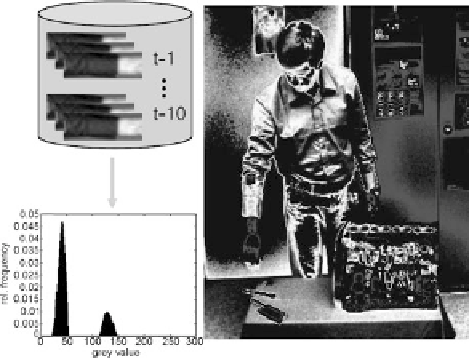
Fig. 2.13
Probability
distribution image for
camera 1, obtained based on
the histogram of the relative
frequency of greyscale pixel
values
(i) a good three-dimensional pose estimation is available at the first time step and
(ii) that the object appearance does not change considerably over a small period of
time.
To verify an estimated three-dimensional pose, five criteria are used: (i) the tem-
poral variation of the orientation similarity, (ii) the current orientation similarity,
(iii) the temporal variation of the appearance similarity for the three-dimensional
pose
T
(t)
compared with the pose
T
(t
−
t)
, (iv) the appearance similarity for
T
(t)
compared with
T
(t
−
t)
, and (v) the appearance similarity for pose
T
(t)
compared
with pose
T
(t
2
t)
.
If the five criteria of a three-dimensional pose pass a set of thresholds, the pose is
defined as valid and the reference template is added to the database. Otherwise, the
tracking can either be stopped with a warning that the object is lost, or a reference
template-based pose recovery stage can be applied.
−
Pose Recovery on Loss of Object
If the object is deemed to be lost by the ver-
ification stage, the pose recovery stage starts at the last valid three-dimensional
pose vector
T
and computes two possible pose hypotheses: (i) based on a proba-
bility distribution image and (ii) by applying a correlation with the reference tem-
plates.
The first pose hypothesis is obtained using the last 10 reference templates of the
forearm to construct a histogram which describes the forearm appearance. The his-
togram describes the relative frequency of greyscale pixel values (Bradski,
1998
)
and is computed only for camera 1. Similar to Bradski (
1998
), the histogram is used
to compute a probability distribution image for camera 1, as shown in Fig.
2.13
.
The last valid three-dimensional pose vector
T
is used to project a rectangle cir-
cumscribing the forearm into the probability distribution image. A two-dimensional
greedy optimisation in the image plane is applied to find the centre and rotation of
the rectangle with the maximum sum of pixel probabilities. Using the best match-
ing rectangle, we construct a three-dimensional pose under the assumption that the
Search WWH ::

Custom Search