Graphics Reference
In-Depth Information
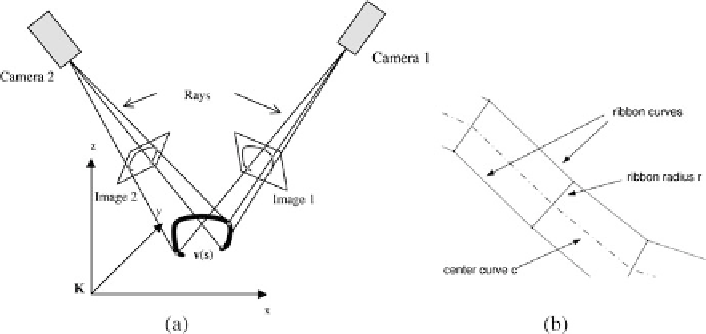
Fig. 2.3
(
a
) Projection of the three-dimensional curve model
v
(s)
into multiple images. Two cam-
eras are observing the scene. Calculation of the external energy requires the contour curves in the
image planes of all cameras. (
b
) Sketch of a ribbon snake
Each scene point
W
p
is projected to the corresponding image point
S
i
p
defined
in the sensor coordinate system. The energy term
E
ext
that connects the contour
with the images is calculated based on the projection of the contour into each im-
age plane according to
E
ext
=
i
=
1
E
ext
(
S
i
p
)
. Hence, generating different active
contours separately for each image or a depth map determined e.g. by stereo image
analysis is not necessary. All image and constraint information is used by the energy
minimisation step in the model parameter space. In our examples, we use the image
gradient as the external energy term, i.e.
E
ext
(
S
i
p
)
I
i
(
S
i
p
)
. Occlusions of
the object are not considered during modelling, but the algorithm copes with partial
occlusions and holes in the contour if they do not appear excessively. The energy
terms
E
int
and
E
con
are independent of occlusions that may occur in some views.
The described approach requires that either the points of the extracted three-
dimensional snake correspond to the same scene points, respectively, or that the
object displays certain symmetries. In our scenario of inspection of tubes and cables,
the objects to be segmented are rotationally symmetric with respect to a centreline,
such that their silhouette is similar from multiple viewpoints and can be described by
a centre curve
(x(s), y(s), z(s))
T
and a radius
r(s)
, leading to
v
(s)
=
(x,y,z,r)
T
(Fig.
2.3
b). In this case, the contour model is not a simple curve and cannot be
projected into the images as described above. Instead, the centreline
(x,y,z)
T
is
projected into the images while the corresponding ribbon curves are calculated by
projecting the radius
r
into the image planes.
If prior knowledge about the contour is available, it can be integrated into the
snake optimisation algorithm to improve its convergence. In an industrial produc-
tion environment, CAD models of the parts that are subject to quality inspection
are available and can be used to provide prior knowledge to the active contour seg-
mentation. If the shape of objects should be recovered, only constraints that are
invariant to the possible shapes of the object should be used. For quality inspection
=−∇
Search WWH ::

Custom Search