Graphics Reference
In-Depth Information
Purposive action (avatar motion)
Time
Time
Time
t
7
v
45
=S
23
+
S
34
t
6
Zero-crossing
t
5
Pre-stored action
(controller operation)
S
34
t
4
t
3
t
2
Transformation rule
S
23
t
t
1
∫
−
n
v
(
t
~
t
)
=
s
(
t
)
dt
Angle of controller
lever
s
Avatar
velocity
v
Avatar
position
x
n
n
+
1
t
n
2
Fig. 3 Rhythm controller
to make operators co-create both temporal and spatial Ma in the virtual space.
Further, we need requirement 3 to make operators provide for the possibility of
creating action and co-create Maai in inde
!
nite conditions. However, the method
for realizing requirement 3 is a major problem. To meet such a requirement, the
rhythm controller needs to be designed for its controller input to not have a one-to-
one correspondence with avatar motion. In other words, even if avatar motion is the
same, the meaning of its motion changes according to the situation. Consequently,
to realize requirement 3, operators have to be able to change the controller operation
(pre-stored action) to adapt it to changes in the meaning of avatar motion. That is,
we have to design the transformation rule such that many different controller inputs
can result in the same speci
!
c avatar motion.
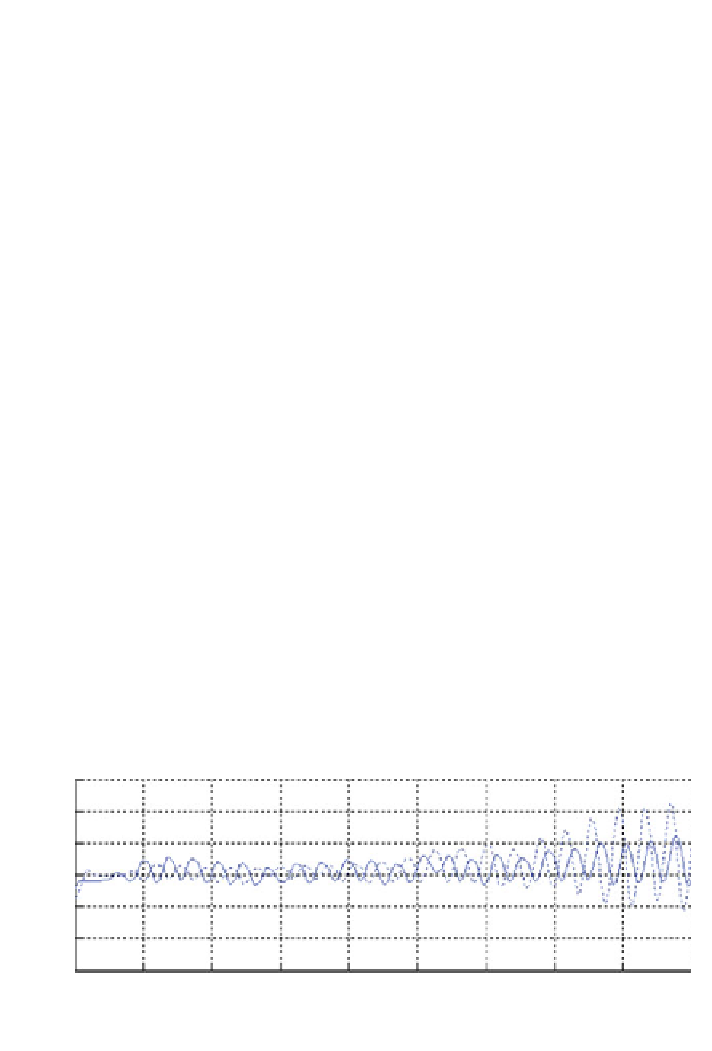
Figure
3
shows the rhythm controller we developed to realize the three
requirements. When the zero-cross was created on the controller waveform, as
points prior was integrated, and the integrated value (
Δ
S) was used as a velocity
output value for the next zero-cross point to operate the avatar. Such a transfor-
operator creates speci
!
c avatar motion, both the cycle and amplitude of the
300
200
100
0
-100
-200
-300
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Time (ms)
Fig. 4 Change of rhythm controller waveforms when the operator creates speci
!
c avatar motion