Environmental Engineering Reference
In-Depth Information
x
3
x
2
a
ˆ
x
1
ˆ
b
g
ˆ
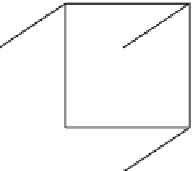
Figure 10.8
The principal axes of a solid cube for rotations about a corner.
centre, the three eigenvalues are degenerate. In such a case, any linear sum of the
principal axis basis vectors is also an eigenvector of
I
, i.e. given the eigenvectors
ˆ
,
ˆ
b
ˆ
α
β
,
ˆ
γ
we can always construct a new vector,
a
ˆ
α
+
β
+
c
ˆ
γ
, that also satisfies
the eigenvalue equation:
b
ˆ
b
ˆ
I
(a
ˆ
α
+
β
+
c
ˆ
γ
)
=
I
0
(a
ˆ
α
+
β
+
c
ˆ
γ
),
(10.38)
Mb
2
/
6 is the degenerate eigenvalue. Thus we were really free to choose
any
set of mutually perpendicular axes as principal axes for rotations of the uniform
cube about its centre.
Fortunately, it is not always necessary to solve a cubic equation in order to figure
out the principal axes of rotation of a rigid body. There are two circumstances under
which the process simplifies quite considerably. Namely, when the object is flat (i.e.
planar) and when the object possesses an axis of symmetry. If a body is both flat
and symmetric then no calculation is needed and one can write down the principal
axes directly, as we shall see in the following example.
where
I
0
=
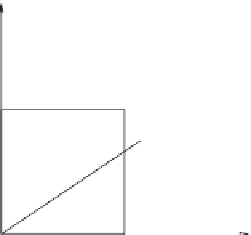
Example 10.3.2
Determine a set of principal axes for a square plate that rotates
about a corner.
Solution 10.3.2
Well we already worked out the moment of inertia tensor of a gen-
eral planar object, see Eq. (10.26) and the first thing to notice is that it is already
partially diagonal after picking the
e
3
axis to lie perpendicular to the plane of
the body and through the point of rotation. That means that
e
3
is a principal axis
because it satisfies the eigenvalue equation
Ie
3
=
(I
11
+
I
22
)
e
3
.
We therefore need only find the other two principal axes. Generally, that would mean
we would need to find the eigenvectors of the
2
×
2
submatrix
I
11
I
12
I
21
I
22