Environmental Engineering Reference
In-Depth Information
results to give us
d
L
C
d
t
d
ω
d
t
τ
C
=
=
I
C
=
I
C
α.
(4.40)
We therefore have a framework for describing the combined rotational and trans-
lational motion of a rigid body, which works even if the body is accelerating. The
motion of the centre of mass is obtained by solving Newton's Second Law (see
Section 2.2.1) and the rotation about the centre of mass may be handled using
Eq. (4.40), provided the rotation axis has a fixed direction. The following example
nicely illustrates how these two equations of motion are used together.
Example 4.4.1
A bowling ball is launched across a horizontal floor with speed V
0
and no initial rotation about its centre of mass. At first it skids, then it begins to roll.
What is the speed of the ball when it starts to roll?
Solution 4.4.1
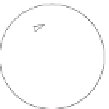
Figure 4.9 shows the forces and velocities. Initially the ball has
centre-of-mass velocity V
C
=
0
about a horizontal axis
through the centre of mass (directed into the page in the figure). Kinetic friction at
the point of contact between the ball and the floor will cause ω to increase while at
the same time reducing V
C
. The normal force N determines the friction according to
V
0
and angular speed ω
=
F
=
µ
k
N
=
µ
k
Mg,
where µ
k
is the coefficient of kinetic friction and M is the mass of the ball. To find
the effect of this force on V
C
we use Newton's Second Law:
M
d
V
C
d
t
−
=
µ
k
Mg
.
Integration with respect to time gives
V
C
=
V
0
−
µ
k
gt,
(4.41)
where we have used the initial condition V
C
=
0
. Now we turn our
attention to the rotation, remembering that since the ball accelerates horizonally
(i.e. it slows down) we must compute the angular momentum and torque about the
centre of the ball. We now use Eq. (4.40) to determine the effect of the torque on the
V
0
at t
=
⊗ w
V
C
N
F
Figure 4.9
The dynamics of a bowling ball.