Biomedical Engineering Reference
In-Depth Information
The phase-plane analysis of the system can be made using Eqn
(16.105)
.
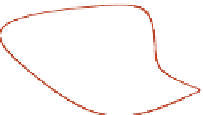
Fig. 16.23
a
describes the limit cycles (oscillatory trajectories) of prey
e
predator populations for different
initial population levels. The Lotka
e
Volterra model considers the exponential growth of prey
species in the absence of predator and neglects the utilization of substrate by prey species
according to Monod form. The Lotka
e
Volterra oscillations depend on initial conditions
and change their amplitude and frequency in the presence of an external disturbance. These
types of oscillation are called soft oscillations.
Eqns
(16.87)
e
(16.89)
explain the more stable and sustained oscillations observed in nature,
which are independent of initial conditions (that is, hard oscillations). A differential equation
integrator (such as Odexlims used in this text) can be employed to obtain the solutions from
the set of
Eqns (16.87)
e
(16.89)
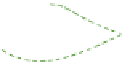
, and the phase
e
plane data are shown in
Fig. 16.23
b.
Fig. 16.23
b
shows that the trajectory depends on the initial conditions, whereas the limit cycle (oscilla-
tion) is not dependent on the initial conditions. The dynamic solution does not approach
the steady-state value; however, the populations are bound and nonzero. Even when the
initial populations correspond to those of the steady-state solution (point F in
Fig. 16.23
b),
minor fluctuations cause the dynamic populations to shift away and eventually confirm to
the limit cycle (solid line). A 3D plot of the trajectory toward sustainable state and corre-
sponding phase-plane trajectories on substrate versus prey population are shown in
Fig. 16.24
. Therefore, the system is sustainable, although not stable as the single-point/value
steady-state solution cannot be maintained.
16.6.6. Industrial Applications of Mixed Cultures
Growth behavior differences and cell
e
cell interactions are the main causes of instabilities
in mixed cultures as we have learned. Industrial applications are designed such instabilities
are minimized to maintain process integrity and/or product quality.
(a)
(b)
10
1
4
A
10
0
F
E
B
10
-1
D
3
10
-2
10
-3
2
10
-4
C
C
10
-5
1
10
-6
B
A
0
10
-7
0
1
2
3
10
-5
10
-4
10
-3
10
-2
10
-1
10
0
10
1
X
b
/
X
bF
X
b
/
X
bF
FIGURE 16.23
Phase-plane trajectories for prey
e
predator interactions. (a) Limit cycles predicted by Lotka
e
k
0
dp
¼
1
2
m
0
b
. (b) Trajectories when the substrate limitation and Monod predator growth
Volterra, Eqn
(16.105)
, with
m
bmax
, k
dp
¼
0, K
b
¼
5
10
4
S
0
,YF
p/b
¼
7.14
10
4
,YF
b/S
S
0
¼
3 X
b0
, K
p
¼
0.4 X
b0
. The predicted steady-state point is defined by X
pF
and X
bF
. A, B, and C (and D, E, and F) represent different
initial conditions.
rate are used: D
¼
0.6
m
bmax
,
m
pmax
¼
0.96






































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search