Geography Reference
In-Depth Information
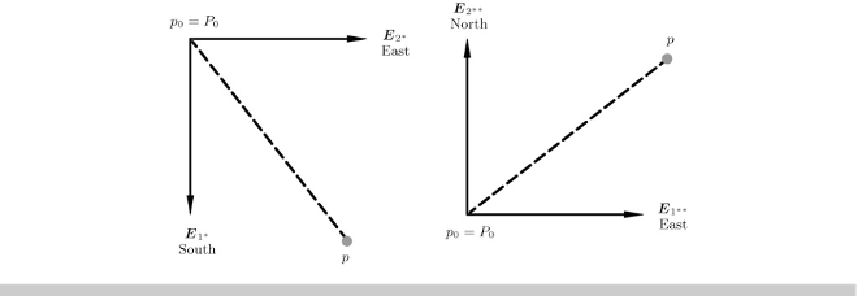
Fig. 8.12.
Ellipsoidal horizontal plane at the point
P
0
In the frame that is located at the point
P
0
, let us here derive the spherical coordinates of the
point
P
from the coordinates
{
α,β,r
}
:
X
P
− X
0
=
r
cos
β
cos
α, Y
P
− Y
0
=
r
cos
β
sin
α, Z
P
− Z
0
=
r
cos
β,
tan
α
=
Y
P
−
Y
0
X
0
=
r
21
(
X
P
−
X
0
)+
r
22
(
Y
P
−
Y
0
)+
r
23
(
Z
P
−
Z
0
)
Z
0
)
,
(8.99)
X
P
−
r
11
(
X
P
−
X
0
)+
r
12
(
Y
P
−
Y
0
)+
r
13
(
Z
P
−
Z
P
− Z
0
tan
β
=
(
X
P
−
Y
0
)
2
.
X
0
)
2
+(
Y
P
−
Finally, we transform the relative placement vector
{
X
P
−
X
0
,Y
P
−
Y
0
,Z
P
−
Z
0
}
E
to the relative
X
P
−
X
0
,Y
P
−
Y
0
,Z
P
−
Z
0
}
placement vector
{
E
∗
:
⎡
⎤
⎡
⎤
X
P
−
X
0
X
P
−
X
0
⎣
⎦
E
∗
⎣
⎦
E
Y
P
−
Y
0
=
R
E
(
Λ
0
,Φ
0
,
0)
Y
P
−
Y
0
,
(8.100)
Z
P
−
Z
0
Z
P
−
Z
0
tan
α
=
−
sin
Φ
0
(
X
P
− X
0
)+cos
Λ
0
(
Y
P
− Y
0
)
sin
Φ
0
cos
Λ
0
(
X
P
Z
0
)
,
=
(8.101)
−
X
0
)+sin
Φ
0
cos
Λ
0
(
Y
P
−
Y
0
)
−
cos
Φ
0
(
Z
P
−
tan
β
analogous
.
The arctan leads to the orientation angle we need. But we have to pay attention to the
quadrant
rule
. The mapping
α ∈
[0
,
2
π
]
→
tan
α
is not injective. Therefore, we must apply the
quadrant
rule
:
Y
P
−
Y
0
positive
,X
P
−
X
0
positive : 1st quadrant 0
≤
α<π/
2
,
Y
P
−
Y
0
positive
,X
P
−
X
0
negative : 2nd quadrant
π/
2
≤
α<
0
,
(8.102)
Y
P
−
Y
0
negative
,X
P
−
X
0
negative : 3rd quadrant
π
≤
α<
3
π/
2
,
Y
P
−
Y
0
negative
,X
P
−
X
0
positive : 4th quadrant 3
π/
2
≤
α<
2
π.




Search WWH ::

Custom Search