Geography Reference
In-Depth Information
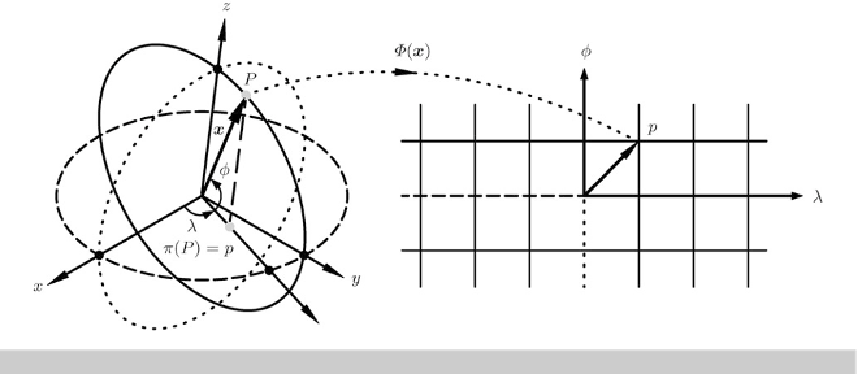
S
r
,chart
Φ
(
x
)=[
λ
(
x
)
,φ
(
x
)]: the angular parameters are
λ
Fig. 3.2.
Manifold “two-sphere”
∈
[0
,
2
π
[and
φ
∈
]
−
π/
2
,
+
π/
2[
Definition 3.3 (Atlas, complete atlas, minimal atlas).
n
of dimension
n
is a family of open sets
An atlas of a manifold
M
U
i
,i
∈{
1
,...,I
}
, called
charts
,
n
, (ii) for each
i
such that the two conditions (i) and (ii) hold: (i)
∪
i
U
i
(
x
)=
M
∈{
1
,...,I
}
there
n
and a bijective mapping
Φ
i
:U
i
→
is an open set
V
i
⊂
E
V
i
such that
V
i
is isomorphic with
n
:=
n
,δ
μν
E
{
R
}
. Such an atlas is called “complete”. Out of the choice of various charts whose
n
completely, there is one called minimal atlas (which is sometimes also called
maximal), where
I
is minimal.
union covers
M
End of Definition.
As an example think of a
Road Atlas
or a
Geographic Atlas
whose charts cover a part of or the
whole surface of the Earth. In the first case, the atlas of the Earth would be
incomplete
.Inthe
second case,
complete
but not minimal. The various notions of atlas, complete atlas, and minimal
atlas are clarified by the examples that follow. Beforehand, however, let us give a short comment
to the new notions, in particular, to the relation between “charts” and “coordinates”. Indeed,
the set of all charts enables us to associate to any point of
n
locally a set of coordinates. As
M
n
,δ
μν
n
,mostofthetime
coordinates of a point
x
, we introduce the image
Φ
(
x
)in
{
R
}
=:
E
equipped with an Euclidean metric or with a pseudo-Euclidean metric.
1
Example 3.3 (Circle
S
r
, complete atlas:
I
=4).
1
A complete atlas of
S
r
is generated by four charts of the type
r
U
1
:=
{
[
x, y
]
∈
S
|
y>
0
}
,Φ
1
[
x, y
]:=
x
=
t
1
,
U
2
:=
{
[
x, y
]
∈
S
r
|x>
0
},Φ
2
[
x, y
]:=
y
=
t
2
,
r
U
3
:=
{
[
x, y
]
∈
S
|
y<
0
}
,Φ
3
[
x, y
]:=
x
=
t
3
,
(3.14)



Search WWH ::

Custom Search